Enrejado (grupo)
This article relies largely or entirely on a single source. (October 2022) |


| Algebraic structure → Group theory Group theory |
|---|
 |

En geometría y teoría de grupos , una red en el espacio de coordenadas reales es un conjunto infinito de puntos en este espacio con las propiedades de que la suma o resta de dos puntos en la red, en función de las coordenadas, produce otro punto de la red, que todos los puntos de la red están separados por una distancia mínima y que cada punto en el espacio está dentro de una distancia máxima de un punto de la red. El cierre bajo la suma y la resta significa que una red debe ser un subgrupo del grupo aditivo de los puntos en el espacio, y los requisitos de distancia mínima y máxima se pueden resumir diciendo que una red es un conjunto de Delone . De manera más abstracta, una red se puede describir como un grupo abeliano libre de dimensión que abarca el espacio vectorial . Para cualquier base de , el subgrupo de todas las combinaciones lineales con coeficientes enteros de los vectores base forma una red, y cada red se puede formar a partir de una base de esta manera. Una red se puede ver como una teselación regular de un espacio por una celda primitiva .


Las redes tienen muchas aplicaciones significativas en matemáticas puras, particularmente en conexión con las álgebras de Lie , la teoría de números y la teoría de grupos . También surgen en matemáticas aplicadas en conexión con la teoría de codificación , en la teoría de percolación para estudiar la conectividad que surge de interacciones a pequeña escala, criptografía debido a la conjetura de la dificultad computacional de varios problemas de redes , y se utilizan de diversas maneras en las ciencias físicas. Por ejemplo, en la ciencia de los materiales y la física del estado sólido , una red es un sinónimo para el marco de una estructura cristalina , una matriz tridimensional de puntos espaciados regularmente que coinciden en casos especiales con las posiciones de los átomos o moléculas en un cristal . De manera más general, los modelos de redes se estudian en física , a menudo mediante las técnicas de la física computacional .
Consideraciones y ejemplos de simetría
Una red es un grupo de simetría de simetría traslacional discreta en n direcciones. Un patrón con esta red de simetría traslacional no puede tener más, pero puede tener menos simetría que la red misma. [1] Como grupo (descartando su estructura geométrica), una red es un grupo abeliano libre finitamente generado y, por lo tanto, isomorfo a .

Una red en el sentido de una matriz tridimensional de puntos espaciados regularmente que coinciden, por ejemplo, con las posiciones de los átomos o moléculas en un cristal , o más generalmente, la órbita de una acción de grupo bajo simetría traslacional, es una traslación de la red de traslación: un conjunto lateral, que no necesita contener el origen y, por lo tanto, no necesita ser una red en el sentido anterior.
Un ejemplo simple de un retículo en es el subgrupo . Ejemplos más complicados incluyen el retículo E8 , que es un retículo en , y el retículo Leech en . El retículo de período en es central para el estudio de funciones elípticas , desarrollado en las matemáticas del siglo XIX; se generaliza a dimensiones superiores en la teoría de funciones abelianas . Los retículos llamados retículos de raíces son importantes en la teoría de álgebras de Lie simples ; por ejemplo, el retículo E8 está relacionado con un álgebra de Lie que lleva el mismo nombre.



Dividir el espacio según una red
Una red tiene por tanto la forma


donde { v 1 , ..., v n } es una base para . Diferentes bases pueden generar la misma red, pero el valor absoluto del determinante de los vectores v i está determinado de forma única por y denotado por d( ). Si uno piensa en una red como si dividiera la totalidad de en poliedros iguales (copias de un paralelepípedo n -dimensional , conocido como la región fundamental de la red), entonces d( ) es igual al volumen n -dimensional de este poliedro. Es por esto que d( ) a veces se llama covolumen de la red. Si es igual a 1, la red se llama unimodular .
Puntos reticulares en conjuntos convexos
El teorema de Minkowski relaciona el número d( ) y el volumen de un conjunto convexo simétrico S con el número de puntos de la red contenidos en S . El número de puntos de la red contenidos en un politopo cuyos vértices son todos elementos de la red se describe mediante el polinomio de Ehrhart del politopo . Las fórmulas para algunos de los coeficientes de este polinomio también involucran d( ).
Problemas computacionales de red
Los problemas de red computacionales tienen muchas aplicaciones en la ciencia informática. Por ejemplo, el algoritmo de reducción de base de red Lenstra–Lenstra–Lovász (LLL) se ha utilizado en el criptoanálisis de muchos esquemas de cifrado de clave pública [2] , y se sabe que muchos esquemas criptográficos basados en red son seguros bajo el supuesto de que ciertos problemas de red son computacionalmente difíciles [3] .
Retículas en dos dimensiones: discusión detallada
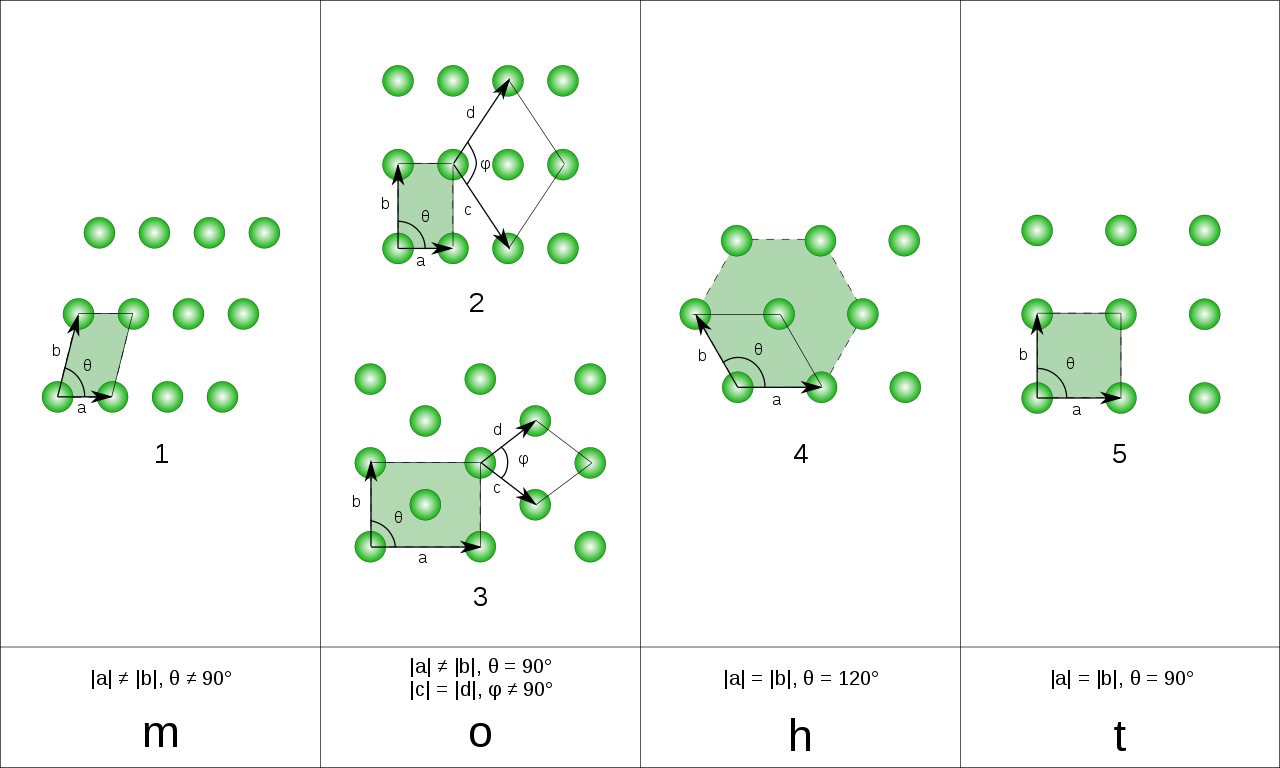
Hay cinco tipos de red 2D según lo dado por el teorema de restricción cristalográfica . A continuación, el grupo de papel tapiz de la red se da en notación IUCr , notación Orbifold y notación Coxeter , junto con un diagrama de papel tapiz que muestra los dominios de simetría. Tenga en cuenta que un patrón con esta red de simetría traslacional no puede tener más, pero puede tener menos simetría que la red misma. Está disponible una lista completa de subgrupos . Por ejemplo, a continuación, la red hexagonal / triangular se da dos veces, con simetría reflexiva completa de 6 pliegues y media de 3 pliegues. Si el grupo de simetría de un patrón contiene una rotación de n pliegues, entonces la red tiene simetría de n pliegues para n par y 2 n pliegues para n impar .
| cmm, (2*22), [∞,2 + ,∞] | p4m, (*442), [4,4] | p6m, (*632), [6,3] |
|---|---|---|
  red rómbica también red rectangular centrada red triangular isósceles |   red cuadrada triángulo isósceles recto |  red hexagonal (red triangular equilátera) |
| pmm, *2222, [∞,2,∞] | p2, 2222, [∞,2,∞] + | p3m1, (*333), [3 [3] ] |
  red rectangular también red rómbica centrada red triangular rectángulo |  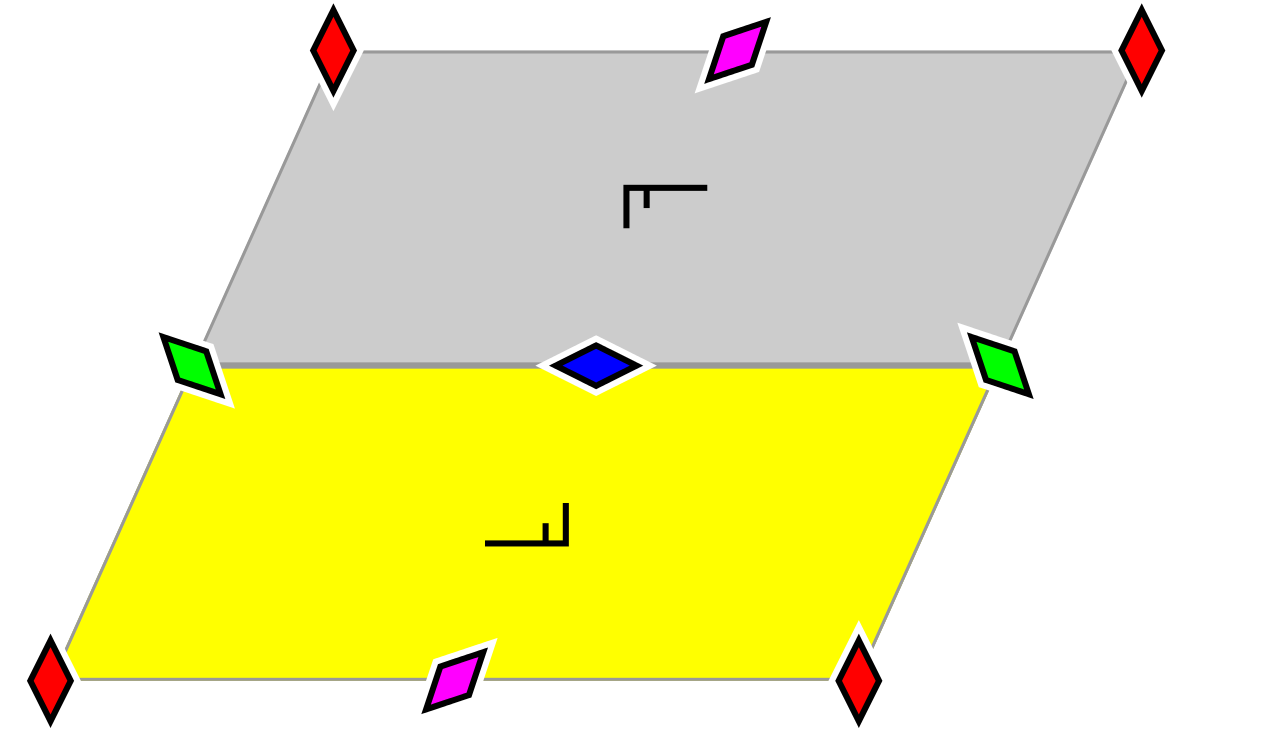 celosía oblicua escaleno triangular |  red triangular equilátera (red hexagonal) |
Para la clasificación de una red dada, comience con un punto y tome el segundo punto más cercano. Para el tercer punto, que no está en la misma línea, considere sus distancias a ambos puntos. Entre los puntos para los cuales la menor de estas dos distancias es menor, elija un punto para el cual la mayor de las dos sea menor. (No es lógicamente equivalente , pero en el caso de redes que dan el mismo resultado es simplemente "Elija un punto para el cual la mayor de las dos sea menor").
Los cinco casos corresponden a triángulos equiláteros, rectángulos isósceles, rectángulos isósceles y escalenos. En un retículo rómbico, la distancia más corta puede ser una diagonal o un lado del rombo, es decir, el segmento de línea que une los dos primeros puntos puede ser o no uno de los lados iguales del triángulo isósceles. Esto depende de que el ángulo menor del rombo sea menor de 60° o entre 60° y 90°.
El caso general se conoce como red de períodos . Si los vectores p y q generan la red, en lugar de p y q también podemos tomar p y p - q , etc. En general, en 2D, podemos tomar a p + b q y c p + d q para los números enteros a , b , c y d tales que ad-bc es 1 o -1. Esto garantiza que p y q sean en sí mismos combinaciones lineales enteras de los otros dos vectores. Cada par p , q define un paralelogramo, todos con la misma área, la magnitud del producto vectorial . Un paralelogramo define completamente todo el objeto. Sin más simetría, este paralelogramo es un paralelogramo fundamental .

Los vectores p y q pueden representarse mediante números complejos . Hasta el tamaño y la orientación, un par puede representarse por su cociente. Expresado geométricamente: si dos puntos de la red son 0 y 1, consideramos la posición de un tercer punto de la red. La equivalencia en el sentido de generar la misma red se representa mediante el grupo modular : representa elegir un tercer punto diferente en la misma cuadrícula, representa elegir un lado diferente del triángulo como lado de referencia 0–1, lo que en general implica cambiar la escala de la red y rotarla. Cada "triángulo curvo" en la imagen contiene para cada forma de red 2D un número complejo, el área gris es una representación canónica, correspondiente a la clasificación anterior, con 0 y 1 dos puntos de la red que están más cerca uno del otro; la duplicación se evita incluyendo solo la mitad del límite. Las redes rómbicas se representan por los puntos en su límite, con la red hexagonal como vértice, e i para la red cuadrada. Las redes rectangulares están en el eje imaginario, y el área restante representa las redes paralelogramáticas, con la imagen especular de un paralelogramo representada por la imagen especular en el eje imaginario.


Rejillas en tres dimensiones
Los 14 tipos de redes en 3D se denominan redes de Bravais . Se caracterizan por su grupo espacial . Los patrones 3D con simetría traslacional de un tipo particular no pueden tener más simetría que la red misma, pero pueden tener menos.
Retículas en el espacio complejo
Una red en es un subgrupo discreto de que se genera como un espacio vectorial real. Como la dimensión de como un espacio vectorial real es igual a , una red en será un grupo abeliano libre de rango .


Por ejemplo, los números enteros gaussianos forman una red en , ya que es una base de sobre .
![{\displaystyle \mathbb {Z} [i]=\mathbb {Z} +i\mathbb {Z} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2749edc2f0a1147036f27d5dd0f5c7e365ac981)




En grupos de mentiras
De manera más general, una red Γ en un grupo de Lie G es un subgrupo discreto , tal que el cociente G /Γ es de medida finita, pues la medida en él se hereda de la medida de Haar en G (invariante por la izquierda o invariante por la derecha; la definición es independiente de esa elección). Ese será ciertamente el caso cuando G /Γ sea compacto , pero esa condición suficiente no es necesaria, como lo demuestra el caso del grupo modular en SL 2 ( R ) , que es una red pero donde el cociente no es compacto (tiene cúspides ). Hay resultados generales que establecen la existencia de redes en grupos de Lie.
Se dice que una red es uniforme o cocompacta si G /Γ es compacta; de lo contrario, la red se llama no uniforme .
Retículas en espacios vectoriales generales
Si bien normalmente consideramos que las redes en este concepto se pueden generalizar a cualquier espacio vectorial de dimensión finita sobre cualquier cuerpo . Esto se puede hacer de la siguiente manera:
Sea K un cuerpo , sea V un espacio vectorial K de dimensión n , sea una base K para V y sea R un anillo contenido dentro de K. Entonces , la red R en V generada por B está dada por:



En general, distintas bases B generarán diferentes retículos. Sin embargo, si la matriz de transición T entre las bases está en - el grupo lineal general de R (en términos simples esto significa que todas las entradas de T están en R y todas las entradas de están en R - lo que equivale a decir que el determinante de T está en - el grupo unitario de elementos en R con inversos multiplicativos) entonces los retículos generados por estas bases serán isomorfos ya que T induce un isomorfismo entre los dos retículos.



Casos importantes de tales redes ocurren en la teoría de números, siendo K un cuerpo p -ádico y R los enteros p -ádicos .
Para un espacio vectorial que es también un espacio de producto interno , la red dual puede describirse concretamente mediante el conjunto

o equivalentemente como

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Nociones relacionadas
- Un elemento primitivo de una red es un elemento que no es un múltiplo entero positivo de otro elemento de la red. [ cita requerida ]
Véase también
Notas
- ^ "Apuntes sobre simetría en cristalografía". xrayweb.chem.ou.edu . Consultado el 6 de noviembre de 2022 .
- ^ Nguyen, Phong; Stern, Jacques (2001). "Las dos caras de los enrejados en criptología". Criptografía y enrejados . Apuntes de clase en informática. Vol. 2146. págs. 146–180. doi :10.1007/3-540-44670-2_12. ISBN 978-3-540-42488-8.
- ^ Regev, Oded (1 de enero de 2005). "Sobre redes, aprendizaje con errores, códigos lineales aleatorios y criptografía". Actas del trigésimo séptimo simposio anual de la ACM sobre teoría de la computación . STOC '05. Nueva York, NY, EE. UU.: ACM. pp. 84–93. CiteSeerX 10.1.1.110.4776 . doi :10.1145/1060590.1060603. ISBN . 978-1581139600.S2CID53223958 .
Referencias
- Conway, John Horton ; Sloane, Neil JA (1999), Empaquetamientos, celosías y grupos de esferas , Grundlehren der Mathematischen Wissenschaften, vol. 290 (3.ª ed.), Berlín, Nueva York: Springer-Verlag , ISBN 978-0-387-98585-5, Sr. 0920369
Enlaces externos
- Catálogo de celosías (por Nebe y Sloane)
