Para un círculo de radio 1, arcsin y arccos son las longitudes de los arcos reales determinados por las cantidades en cuestión.
Existen varias notaciones para las funciones trigonométricas inversas. La convención más común es nombrar las funciones trigonométricas inversas usando un prefijo arc-: arcsin( x ) , arccos( x ) , arctan( x ) , etc. [1] (Esta convención se utiliza en todo este artículo). Esta notación surge de las siguientes relaciones geométricas: [ cita requerida ]
al medir en radianes, un ángulo de θ radianes corresponderá a un arco cuya longitud es rθ , donde r es el radio del círculo. Por lo tanto, en el círculo unitario , la función coseno de x es tanto el arco como el ángulo, porque el arco de un círculo de radio 1 es el mismo que el ángulo. O bien, "el arco cuyo coseno es x " es lo mismo que "el ángulo cuyo coseno es x ", porque la longitud del arco del círculo en radios es la misma que la medida del ángulo en radianes. [5] En los lenguajes de programación informática, las funciones trigonométricas inversas suelen denominarse con las formas abreviadas asin , acos , atan . [6]
Las notaciones sin −1 ( x ) , cos −1 ( x ) , tan −1 ( x ) , etc., introducidas por John Herschel en 1813, [7] [8] también se usan a menudo en fuentes en idioma inglés, [1] mucho más que las también establecidas sin [−1] ( x ) , cos [−1] ( x ) , tan [−1] ( x ) – convenciones consistentes con la notación de una función inversa , que es útil (por ejemplo) para definir la versión multivaluada de cada función trigonométrica inversa: Sin embargo, esto podría parecer un conflicto lógico con la semántica común para expresiones como sin 2 ( x ) (aunque solo sin 2 x , sin paréntesis, es el uso realmente común), que se refieren a la potencia numérica en lugar de la composición de funciones, y por lo tanto pueden resultar en confusión entre la notación para el recíproco ( inverso multiplicativo ) y función inversa . [9]
La confusión se mitiga un poco por el hecho de que cada una de las funciones trigonométricas recíprocas tiene su propio nombre —por ejemplo, (cos( x )) −1 = sec( x ) — . Sin embargo, algunos autores desaconsejan su uso, ya que es ambiguo. [1] [10] Otra convención precaria utilizada por un pequeño número de autores es utilizar una primera letra mayúscula , junto con un superíndice “ −1 ”: Sin −1 ( x ) , Cos −1 ( x ) , Tan −1 ( x ) , etc. [11] Aunque se pretende evitar la confusión con el recíproco , que debería representarse por sin −1 ( x ) , cos −1 ( x ) , etc., o, mejor, por sin −1 x , cos −1 x , etc., a su vez crea otra fuente importante de ambigüedad, especialmente porque muchos lenguajes de programación de alto nivel populares (por ejemplo, Mathematica y MAGMA ) utilizan esas mismas representaciones en mayúsculas para las funciones trigonométricas estándar, mientras que otros ( Python , SymPy , NumPy , Matlab , MAPLE , etc.) utilizan minúsculas.
Por ello, desde 2009, la norma ISO 80000-2 especifica únicamente el prefijo "arco" para las funciones inversas.
Conceptos básicos
Los puntos etiquetados 1 , Sec( θ ) , Csc( θ ) representan la longitud del segmento de línea desde el origen hasta ese punto. Sin( θ ) , Tan( θ ) y 1 son las alturas de la línea que comienza en el eje x , mientras que Cos( θ ) , 1 y Cot( θ ) son longitudes a lo largo del eje x que comienzan desde el origen.
Por ejemplo, usando función en el sentido de funciones multivaluadas , tal como la función raíz cuadrada podría definirse a partir de la función se define de modo que Para un número real dado con hay múltiples (de hecho, infinitamente contables ) números tales que ; por ejemplo, pero también etc. Cuando solo se desea un valor, la función puede restringirse a su rama principal . Con esta restricción, para cada en el dominio, la expresión evaluará solo un único valor, llamado su valor principal . Estas propiedades se aplican a todas las funciones trigonométricas inversas.
Las inversas principales se enumeran en la siguiente tabla.
Nota: Algunos autores [ cita requerida ] definen el rango de la arcosecante como , porque la función tangente no es negativa en este dominio. Esto hace que algunos cálculos sean más consistentes. Por ejemplo, al usar este rango, mientras que con el rango , tendríamos que escribir ya que la tangente no es negativa en pero no positiva en Por una razón similar, los mismos autores definen el rango de la arcocosecante como o
Dominios
Si se permite que sea un número complejo , entonces el rango de se aplica sólo a su parte real.
La siguiente tabla muestra los nombres y dominios de las funciones trigonométricas inversas junto con el rango de sus valores principales habituales en radianes .
El símbolo denota el conjunto de todos los números reales y denota el conjunto de todos los números enteros . El conjunto de todos los múltiplos enteros de se denota por
El símbolo denota la resta de conjuntos , de modo que, por ejemplo, es el conjunto de puntos en (es decir, números reales) que no están en el intervalo
Ahora se explica la notación de suma de Minkowski que se utiliza arriba para escribir de forma concisa los dominios de .
Dominio de la cotangente y la cosecante : Los dominios de y son los mismos. Son el conjunto de todos los ángulos en los que, es decir, todos los números reales que no tienen la forma de algún entero.
Dominio de la tangente y la secante : Los dominios de y son los mismos. Son el conjunto de todos los ángulos en los que
Soluciones a ecuaciones trigonométricas elementales
Cada una de las funciones trigonométricas es periódica en la parte real de su argumento, recorriendo todos sus valores dos veces en cada intervalo de
El seno y la cosecante comienzan su período en (donde es un entero), lo terminan en y luego se invierten a
El coseno y la secante comienzan su período en y lo terminan en y luego se invierten en
La tangente comienza su período en, lo termina en y luego lo repite (hacia adelante) en
La cotangente comienza su período en, lo termina en y luego lo repite (hacia adelante) hasta
Esta periodicidad se refleja en las inversas generales, donde es un número entero.
La siguiente tabla muestra cómo se pueden utilizar las funciones trigonométricas inversas para resolver igualdades que involucran las seis funciones trigonométricas estándar. Se supone que los valores dados y todos se encuentran dentro de rangos apropiados para que las expresiones relevantes a continuación estén bien definidas . Tenga en cuenta que "para algunos " es simplemente otra forma de decir "para algunos números enteros ".
El símbolo es igualdad lógica e indica que si el lado izquierdo es verdadero, entonces también lo es el lado derecho y, a la inversa, si el lado derecho es verdadero, entonces también lo es el lado izquierdo (ver esta nota al pie [nota 1] para más detalles y un ejemplo que ilustra este concepto).
Por ejemplo, si entonces para algún Mientras que si entonces para algún donde será par si y será impar si Las ecuaciones y tienen las mismas soluciones que y respectivamente. En todas las ecuaciones anteriores excepto en aquellas que se acaban de resolver (es decir, excepto para / y / ), el entero en la fórmula de la solución está determinado de forma única por (para y fijos ).
Con la ayuda de la paridad entera
es posible escribir una solución que no involucre el símbolo "más o menos":
si y solo si por alguna razón
Y de manera similar para la función secante,
si y solo si por alguna razón
donde es igual cuando el entero es par, y es igual cuando es impar.
Ejemplo detallado y explicación del símbolo "más o menos"±
Las soluciones de y implican el símbolo "más o menos", cuyo significado se aclara ahora. Solo se analizará la solución de ya que la discusión de es la misma. Se nos da entre y sabemos que hay un ángulo en algún intervalo que satisface Queremos encontrar esto La tabla anterior indica que la solución es
que es una forma abreviada de decir que (al menos) una de las siguientes afirmaciones es verdadera:
para algún entero o
para algún entero
Como se mencionó anteriormente, si (lo que por definición solo ocurre cuando ) entonces ambas afirmaciones (1) y (2) se cumplen, aunque con diferentes valores para el entero : si es el entero de la afirmación (1), lo que significa que se cumple, entonces el entero para la afirmación (2) es (porque ). Sin embargo, si entonces el entero es único y está completamente determinado por
Si (lo que por definición solo ocurre cuando ) entonces (porque y por lo tanto en ambos casos es igual a ) y por lo tanto las afirmaciones (1) y (2) resultan ser idénticas en este caso particular (y por lo tanto ambas se cumplen). Habiendo considerado los casos y ahora nos centramos en el caso donde y Por lo tanto supongamos esto de ahora en adelante. La solución a sigue siendo
que como antes es una forma abreviada de decir que una de las afirmaciones (1) y (2) es verdadera. Sin embargo, esta vez, porque y las afirmaciones (1) y (2) son diferentes y además, se cumple exactamente una de las dos igualdades (no ambas). Se necesita información adicional sobre para determinar cuál se cumple. Por ejemplo, supongamos que y que todo lo que se sabe sobre es que (y no se sabe nada más). Entonces
y además, en este caso particular (tanto para el caso como para el caso) y por lo tanto en consecuencia,
Esto significa que podría ser o Sin información adicional no es posible determinar cuál de estos valores tiene. Un ejemplo de alguna información adicional que podría determinar el valor de sería saber que el ángulo está por encima del eje (en cuyo caso ) o alternativamente, saber que está por debajo del eje (en cuyo caso ).
Funciones trigonométricas idénticas e iguales
La siguiente tabla muestra cómo deben relacionarse dos ángulos si sus valores bajo una función trigonométrica dada son iguales o negativos entre sí.
La flecha doble vertical en la última fila indica que y satisfacen si y solo si satisfacen
Conjunto de todas las soluciones de ecuaciones trigonométricas elementales.
Así, dada una única solución a una ecuación trigonométrica elemental ( es una ecuación de este tipo, por ejemplo, y como siempre se cumple, es siempre una solución), el conjunto de todas las soluciones a ella son:
Si se resuelve
entonces
Conjunto de todas las soluciones (en términos de )
entonces
entonces
entonces
entonces
entonces
entonces
Transformando ecuaciones
Las ecuaciones anteriores se pueden transformar utilizando las identidades de reflexión y desplazamiento: [12]
Transformación de ecuaciones por desplazamientos y reflexiones
Argumento:
Estas fórmulas implican, en particular, que se cumple lo siguiente:
donde intercambiando intercambiando e intercambiando se obtienen las ecuaciones análogas para respectivamente.
Entonces, por ejemplo, al usar la igualdad, la ecuación se puede transformar en lo que permite usar la solución de la ecuación (donde ); esa solución es:
que se convierte en:
donde al usar el hecho de que y sustituyendo se demuestra que otra solución para es:
La sustitución se puede usar para expresar el lado derecho de la fórmula anterior en términos de en lugar de
Relaciones entre funciones trigonométricas y funciones trigonométricas inversas
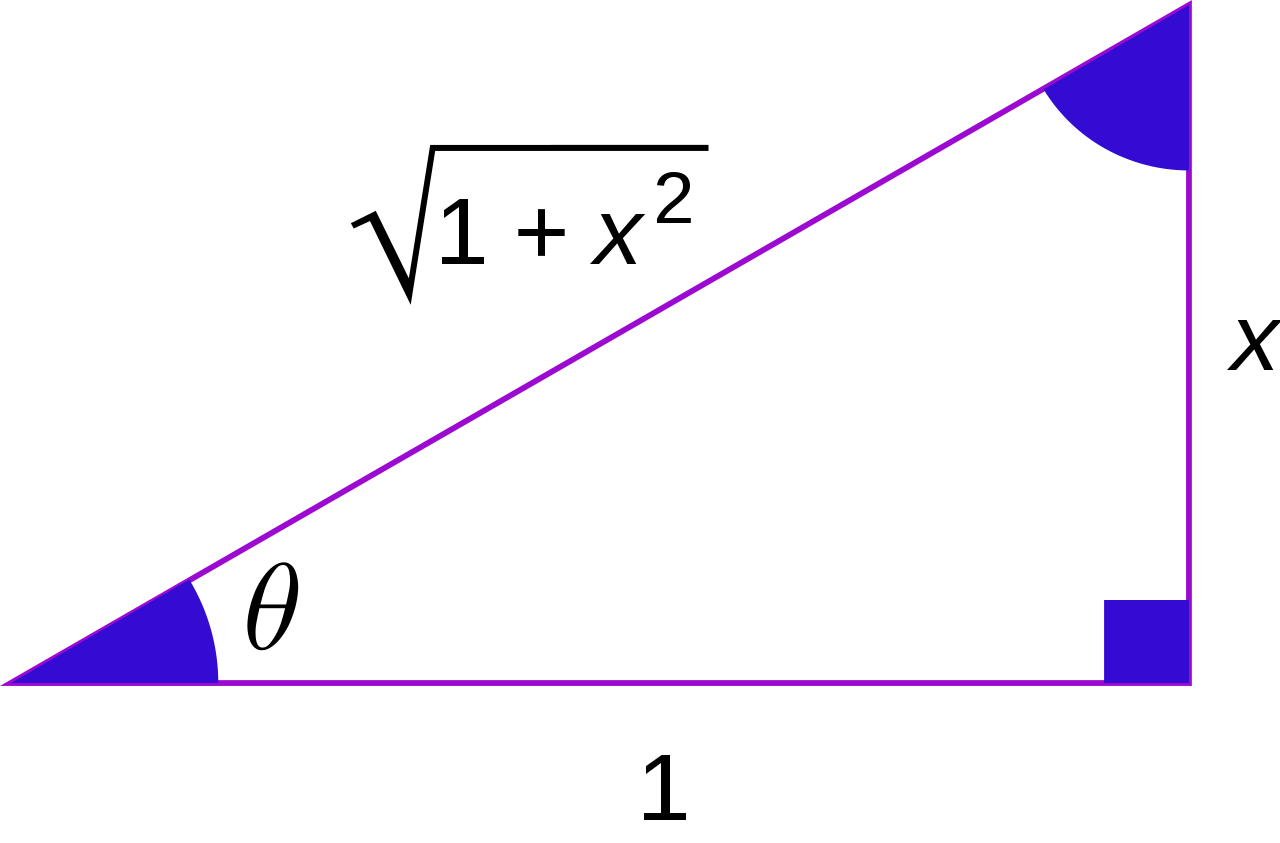
Las funciones trigonométricas de las funciones trigonométricas inversas se tabulan a continuación. Una forma rápida de derivarlas es considerando la geometría de un triángulo rectángulo, con un lado de longitud 1 y otro lado de longitud 1, y luego aplicando el teorema de Pitágoras y las definiciones de las razones trigonométricas. Vale la pena señalar que para el arcosecante y el arcocosecante, el diagrama supone que es positivo y, por lo tanto, el resultado debe corregirse mediante el uso de valores absolutos y la operación signum (sgn).
Diagrama
Relaciones entre las funciones trigonométricas inversas
Los valores principales habituales de las funciones arcsin( x ) (rojo) y arccos( x ) (azul) graficados en el plano cartesiano.Los valores principales habituales de las funciones arctan( x ) y arccot( x ) graficados en el plano cartesiano.Valores principales de las funciones arcsec( x ) y arccsc( x ) graficadas en el plano cartesiano.
Ángulos complementarios:
Argumentos negativos:
Argumentos recíprocos:
Las identidades anteriores se pueden usar con (y derivar de) el hecho de que y son recíprocos (es decir, ), como lo son y y y
Identidades útiles si sólo se tiene un fragmento de una tabla de senos:
Siempre que se utiliza aquí la raíz cuadrada de un número complejo, elegimos la raíz con la parte real positiva (o parte imaginaria positiva si el cuadrado fuera real negativo).
Un formulario útil que se desprende directamente de la tabla anterior es
Las derivadas para valores complejos de z son las siguientes:
Sólo para valores reales de x :
Estas fórmulas se pueden derivar en términos de las derivadas de funciones trigonométricas. Por ejemplo, si , entonces
Expresión como integrales definidas
Integrando la derivada y fijando el valor en un punto se obtiene una expresión para la función trigonométrica inversa como integral definida:
Cuando x es igual a 1, las integrales con dominios limitados son integrales impropias , pero aún así están bien definidas.
Serie infinita
De manera similar a las funciones seno y coseno, las funciones trigonométricas inversas también se pueden calcular utilizando series de potencias , de la siguiente manera. Para el arcoseno, la serie se puede derivar desarrollando su derivada, , como una serie binomial , e integrando término por término (utilizando la definición integral como se indicó anteriormente). La serie para el arcotangente se puede derivar de manera similar desarrollando su derivada en una serie geométrica , y aplicando la definición integral anterior (consulte la serie de Leibniz ).
Las series de las demás funciones trigonométricas inversas se pueden dar en términos de éstas según las relaciones dadas anteriormente. Por ejemplo, , , y así sucesivamente. Otra serie viene dada por: [13]
El segundo de estos es válido en el plano complejo de corte. Hay dos cortes, desde − i hasta el punto en el infinito, bajando por el eje imaginario, y desde i hasta el punto en el infinito, subiendo por el mismo eje. Funciona mejor para números reales que van de −1 a 1. Los denominadores parciales son los números naturales impares, y los numeradores parciales (después del primero) son simplemente ( nz ) 2 , y cada cuadrado perfecto aparece una vez. El primero fue desarrollado por Leonhard Euler ; el segundo por Carl Friedrich Gauss utilizando la serie hipergeométrica gaussiana .
Integrales indefinidas de funciones trigonométricas inversas
Para valores reales y complejos de z :
Para x real ≥ 1:
Para todo x real no comprendido entre -1 y 1:
El valor absoluto es necesario para compensar los valores negativos y positivos de las funciones arcosecante y arcocosecante. La función signum también es necesaria debido a los valores absolutos en las derivadas de las dos funciones, que crean dos soluciones diferentes para valores positivos y negativos de x. Estas pueden simplificarse aún más utilizando las definiciones logarítmicas de las funciones hiperbólicas inversas :
El valor absoluto en el argumento de la función arcosh crea una mitad negativa de su gráfico, haciéndolo idéntico a la función logarítmica signum que se muestra arriba.
Todas estas antiderivadas se pueden derivar utilizando la integración por partes y las formas derivadas simples que se muestran arriba.
Superficie de Riemann para el argumento de la relación tan z = x . La hoja naranja del medio es la hoja principal que representa arctan x . La hoja azul de arriba y la hoja verde de abajo están desplazadas 2 π y −2 π respectivamente.
Dado que las funciones trigonométricas inversas son funciones analíticas , se pueden extender desde la línea real hasta el plano complejo. Esto da como resultado funciones con múltiples hojas y puntos de ramificación . Una forma posible de definir la extensión es:
donde la parte del eje imaginario que no se encuentra estrictamente entre los puntos de ramificación (−i y +i) es el corte de ramificación entre la lámina principal y otras láminas. El camino de la integral no debe cruzar un corte de ramificación. Para z que no está en un corte de ramificación, un camino en línea recta de 0 a z es un camino de este tipo. Para z en un corte de ramificación, el camino debe aproximarse desde Re[x] > 0 para el corte de ramificación superior y desde Re[x] < 0 para el corte de ramificación inferior.
La función arcoseno puede entonces definirse como:
donde (la función raíz cuadrada tiene su corte a lo largo del eje real negativo y) la parte del eje real que no se encuentra estrictamente entre −1 y +1 es el corte de la rama entre la lámina principal de arcsin y otras láminas;
que tiene el mismo corte que arcsin;
que tiene el mismo corte que arctan;
donde la parte del eje real entre −1 y +1 inclusive es el corte entre la lámina principal de arcsec y las demás láminas;
que tiene el mismo corte que arcsec.
Formas logarítmicas
Estas funciones también pueden expresarse mediante logaritmos complejos . Esto extiende sus dominios al plano complejo de manera natural. Las siguientes identidades para los valores principales de las funciones se cumplen en todos los lugares donde se definen, incluso en sus cortes de ramificación.
Generalización
Como todas las funciones trigonométricas inversas dan como resultado un ángulo de un triángulo rectángulo, se pueden generalizar utilizando la fórmula de Euler para formar un triángulo rectángulo en el plano complejo. Algebraicamente, esto nos da:
o
donde es el lado adyacente, es el lado opuesto y es la hipotenusa. A partir de aquí, podemos resolver para .
o
Simplemente tomar la parte imaginaria funciona para cualquier valor real y , pero si o es de valor complejo, tenemos que usar la ecuación final para que la parte real del resultado no se excluya. Dado que la longitud de la hipotenusa no cambia el ángulo, ignorar la parte real de también elimina de la ecuación. En la ecuación final, vemos que el ángulo del triángulo en el plano complejo se puede encontrar ingresando las longitudes de cada lado. Al establecer uno de los tres lados igual a 1 y uno de los lados restantes igual a nuestra entrada , obtenemos una fórmula para una de las funciones trigonométricas inversas, para un total de seis ecuaciones. Debido a que las funciones trigonométricas inversas requieren solo una entrada, debemos poner el lado final del triángulo en términos de los otros dos usando la relación del Teorema de Pitágoras
La siguiente tabla muestra los valores de a, b y c para cada una de las funciones trigonométricas inversas y las expresiones equivalentes para ese resultado de introducir los valores en las ecuaciones anteriores y simplificar.
La forma particular de la expresión simplificada puede hacer que el resultado sea diferente de la rama principal habitual de cada una de las funciones trigonométricas inversas. Las formulaciones dadas generarán la rama principal habitual cuando se utilice la rama principal y para cada función excepto la arcocotangente en la columna. La arcocotangente en la columna generará su rama principal habitual utilizando la convención y .
En este sentido, todas las funciones trigonométricas inversas pueden considerarse casos específicos de la función logaritmo de valor complejo. Dado que estas definiciones funcionan para cualquier función logarítmica de valor complejo , las definiciones permiten ángulos hiperbólicos como salidas y pueden usarse para definir con más detalle las funciones hiperbólicas inversas . Es posible demostrar algebraicamente estas relaciones comenzando con las formas exponenciales de las funciones trigonométricas y resolviendo la función inversa.
Las funciones trigonométricas inversas son útiles cuando se intenta determinar los dos ángulos restantes de un triángulo rectángulo cuando se conocen las longitudes de los lados del triángulo. Recordando las definiciones de seno y coseno en triángulos rectángulos, se deduce que
A menudo, se desconoce la hipotenusa y se debe calcular antes de usar el arcoseno o el arcocoseno utilizando el teorema de Pitágoras : donde es la longitud de la hipotenusa. La arcotangente resulta útil en esta situación, ya que no se necesita la longitud de la hipotenusa.
Por ejemplo, supongamos que un techo desciende 8 pies cuando se extiende 20 pies. El techo forma un ángulo θ con la horizontal, donde θ se puede calcular de la siguiente manera:
En informática e ingeniería
Variante de dos argumentos de la arcotangente
La función atan2 de dos argumentos calcula la arcotangente de y / x dados y y x , pero con un rango de (− π , π ]. En otras palabras, atan2( y , x ) es el ángulo entre el eje x positivo de un plano y el punto ( x , y ) en él, con signo positivo para ángulos en sentido antihorario (semiplano superior, y > 0), y signo negativo para ángulos en el sentido de las agujas del reloj (semiplano inferior, y < 0). Se introdujo por primera vez en muchos lenguajes de programación informática, pero ahora también es común en otros campos de la ciencia y la ingeniería.
En términos de la función arctan estándar , es decir con rango de (− π/2 , π/2 ), se puede expresar de la siguiente manera:
Esta versión limitada de la función anterior también se puede definir utilizando las fórmulas del medio ángulo tangente de la siguiente manera:
siempre que x > 0 o y ≠ 0. Sin embargo, esto falla si se dan x ≤ 0 e y = 0, por lo que la expresión no es adecuada para uso computacional.
El orden de argumentos anterior ( y , x ) parece ser el más común y, en particular, se utiliza en estándares ISO como el lenguaje de programación C , pero algunos autores pueden utilizar la convención opuesta ( x , y ), por lo que se recomienda cierta precaución. Estas variaciones se detallan en atan2 .
Función arcotangente con parámetro de ubicación
En muchas aplicaciones [16] la solución de la ecuación es acercarse lo más posible a un valor dado . La solución adecuada se produce mediante la función arcotangente modificada por parámetros
La función redondea al entero más cercano.
Precisión numérica
Para ángulos cercanos a 0 y π , el arcocoseno está mal condicionado , y lo mismo ocurre con el arcoseno para ángulos cercanos a − π /2 y π /2. Por lo tanto, las aplicaciones informáticas deben considerar la estabilidad de las entradas a estas funciones y la sensibilidad de sus cálculos, o utilizar métodos alternativos. [17]
^ La expresión "LHS RHS" indica que ( a) el lado izquierdo (es decir, LHS) y el lado derecho (es decir, RHS) son ambos verdaderos, o bien (b) el lado izquierdo y el lado derecho son ambos falsos; no hay opción (c) (por ejemplo, no es posible que la declaración LHS sea verdadera y también simultáneamente que la declaración RHS sea falsa), porque de lo contrario "LHS RHS" no se habría escrito.
Para aclarar, supongamos que se escribe "LHS RHS" donde LHS (que abrevia el lado izquierdo ) y RHS son ambos enunciados que pueden ser individualmente verdaderos o falsos. Por ejemplo, si y son algunos números dados y fijos y si se escribe lo siguiente:
entonces LHS es el enunciado " ". Dependiendo de qué valores específicos y tengan, este enunciado LHS puede ser verdadero o falso. Por ejemplo, LHS es verdadero si y (porque en este caso ) pero LHS es falso si y (porque en este caso que no es igual a ); de manera más general, LHS es falso si y De manera similar, RHS es el enunciado " para algunos ". El enunciado RHS también puede ser verdadero o falso (como antes, que el enunciado RHS sea verdadero o falso depende de qué valores específicos y tengan). El símbolo de igualdad lógica significa que (a) si el enunciado LHS es verdadero, entonces el enunciado RHS también es necesariamente verdadero, y además (b) si el enunciado LHS es falso, entonces el enunciado RHS también es necesariamente falso. De manera similar, también significa que (c) si el enunciado RHS es verdadero, entonces el enunciado LHS también es necesariamente verdadero, y además (d) si el enunciado RHS es falso, entonces el enunciado LHS también es necesariamente falso.
^ abcd Hall, Arthur Graham; Frink, Fred Goodrich (enero de 1909). "Capítulo II. El ángulo agudo [14] Funciones trigonométricas inversas". Escrito en Ann Arbor, Michigan, EE. UU. Trigonometría . Vol. Parte I: Trigonometría plana. Nueva York, EE. UU.: Henry Holt and Company / Norwood Press / JS Cushing Co. - Berwick & Smith Co., Norwood, Massachusetts, EE. UU. pág. 15 . Consultado el 12 de agosto de 2017 . […] α = arcsin m : Con frecuencia se lee " arc-seno m " o " anti-seno m ", ya que se dice que dos funciones mutuamente inversas son cada una la antifunción de la otra. […] Una relación simbólica similar se aplica a las otras funciones trigonométricas . […] Esta notación se usa universalmente en Europa y está ganando terreno rápidamente en este país. En los textos ingleses y estadounidenses todavía se encuentra un símbolo menos deseable, α = sen -1 m . La notación α = inv sen m es quizás aún mejor debido a su aplicabilidad general. […]
^ Klein, Félix (1924) [1902]. Elementarmathematik vom höheren Standpunkt aus: Arithmetik, Algebra, Analysis (en alemán). vol. 1 (3ª ed.). Berlín: J. Springer.Traducido como Matemáticas elementales desde un punto de vista avanzado: aritmética, álgebra, análisis. Traducido por Hedrick, ER; Noble, CA Macmillan. 1932. ISBN978-0-486-43480-3.
^ Hazewinkel, Michiel (1994) [1987]. Enciclopedia de matemáticas (edición reimpresa íntegra). Kluwer Academic Publishers / Springer Science & Business Media . ISBN978-155608010-4. Bronshtein, IN; Semendyayev, KA; Musiol, Gerhard; Mühlig, Heiner. "Funciones trigonométricas inversas o ciclométricas". Handbook of Mathematics (6.ª ed.). Berlín: Springer. § 2.8 , págs. 85–89. doi :10.1007/978-3-663-46221-8 (inactivo el 15 de octubre de 2024).{{cite book}}: CS1 maint: DOI inactive as of October 2024 (link) Sin embargo, el término "función arcus" también puede referirse a la función que da el argumento de un número complejo, a veces llamada arcus .
^ Weisstein, Eric W. "Funciones trigonométricas inversas". mathworld.wolfram.com . Consultado el 29 de agosto de 2020 .
^ Cook, John D. (11 de febrero de 2021). "Funciones trigonométricas en distintos lenguajes de programación". johndcook.com (blog) . Consultado el 10 de marzo de 2021 .
^ Herschel, John Frederick William (1813). "Sobre una notable aplicación del teorema de Cotes". Philosophical Transactions . 103 (1). Royal Society, Londres: 8. doi : 10.1098/rstl.1813.0005 .
^ "Funciones trigonométricas inversas". Wiki. Brilliant Math & Science (brilliant.org) . Consultado el 29 de agosto de 2020 .
^ Korn, Grandino Arthur; Korn, Theresa M. (2000) [1961]. "21.2.-4. Funciones trigonométricas inversas". Manual matemático para científicos e ingenieros: definiciones, teoremas y fórmulas para referencia y revisión (3.ª ed.). Mineola, Nueva York, EE. UU.: Dover Publications, Inc. pág. 811. ISBN978-0-486-41147-7.
^ Bhatti, Sanaullah; Nawab-ud-Din; Ahmed, Bashir; Yousuf, SM; Taheem, Allah Bukhsh (1999). "Diferenciación de funciones trigonométricas, logarítmicas y exponenciales". En Ellahi, Mohammad Maqbool; Dar, Karamat Hussain; Hussain, Faheem (eds.). Cálculo y geometría analítica (1.ª ed.). Lahore : Punjab Textbook Board. pág. 140.
^ Abramowitz y Stegun 1972, pág. 73, 4.3.44
^ Borwein, Jonathan; Bailey, David; Gingersohn, Roland (2004). Experimentación en matemáticas: caminos computacionales hacia el descubrimiento (1.ª ed.). Wellesley, MA, EE. UU.: AK Peters . p. 51. ISBN978-1-56881-136-9.
^ Hwang Chien-Lih (2005), "Una derivación elemental de la serie de Euler para la función arcotangente", The Mathematical Gazette , 89 (516): 469–470, doi :10.1017/S0025557200178404, S2CID 123395287
^ SM Abrarov y BM Quine (2018), "Una fórmula para pi que involucra radicales anidados", The Ramanujan Journal , 46 (3): 657–665, arXiv : 1610.07713 , doi :10.1007/s11139-018-9996-8, S2CID 119150623
^ cuando un cruce de ángulos que varía con el tiempo debe representarse mediante una línea suave en lugar de una línea dentada (robótica, astronomía, movimiento angular en general) [ cita requerida ]
^ Gade, Kenneth (2010). "Una representación de posición horizontal no singular" (PDF) . The Journal of Navigation . 63 (3). Cambridge University Press : 395–417. Bibcode :2010JNav...63..395G. doi :10.1017/S0373463309990415.
















































![{\estilo de visualización [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51e3b7f14a6f70e614728c583409a0b9a8b9de01)

![{\displaystyle \left[-{\tfrac {\pi }{2}},{\tfrac {\pi }{2}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c2052f9d4a9c6a14f6db2e4bcd2606bce26d720d)


![{\displaystyle [0,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e2a912eda6ef1afe46a81b518fe9da64a832751)











![{\displaystyle [\,0,\;\pi \,]\;\;\;\setminus \left\{{\tfrac {\pi }{2}}\right\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c913c2c78d11f57ccd118976bfb4b0595e5a2e0e)


![{\displaystyle \left[-{\tfrac {\pi }{2}},{\tfrac {\pi }{2}}\right]\setminus \{0\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e84fda7925743a03ffa0aec3fbed76a2967a3012)





![{\displaystyle \mathbb {R} \setminus (-1,1)=(-\infty ,-1]\cup [1,\infty )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/105fc2887189c9dbf0d165542a768dcd97f03069)





































































































































































































![{\displaystyle {\begin{aligned}\sin \theta &=-\sin(-\theta )&&=-\sin(\pi +\theta )&&={\phantom {-}}\sin(\pi -\theta )\\&=-\cos \left({\frac {\pi }{2}}+\theta \right)&&={\phantom {-}}\cos \left({\frac {\pi }{2}}-\theta \right)&&=-\cos \left(-{\frac {\pi }{2}}-\theta \right)\\&={\phantom {-}}\cos \left(-{\frac {\pi }{2}}+\theta \right)&&=-\cos \left({\frac {3\pi }{2}}-\theta \right)&&=-\cos \left(-{\frac {3\pi }{2}}+\theta \right)\\[0.3ex]\cos \theta &={\phantom {-}}\cos(-\theta )&&=-\cos(\pi +\theta )&&=-\cos(\pi -\theta )\\&={\phantom {-}}\sin \left({\frac {\pi }{2}}+\theta \right)&&={\phantom {-}}\sin \left({\frac {\pi }{2}}-\theta \right)&&=-\sin \left(-{\frac {\pi }{2}}-\theta \right)\\&=-\sin \left(-{\frac {\pi }{2}}+\theta \right)&&=-\sin \left({\frac {3\pi }{2}}-\theta \right)&&={\phantom {-}}\sin \left(-{\frac {3\pi }{2}}+\theta \right)\\[0.3ex]\tan \theta &=-\tan(-\theta )&&={\phantom {-}}\tan(\pi +\theta )&&=-\tan(\pi -\theta )\\&=-\cot \left({\frac {\pi }{2}}+\theta \right)&&={\phantom {-}}\cot \left({\frac {\pi }{2}}-\theta \right)&&={\phantom {-}}\cot \left(-{\frac {\pi }{2}}-\theta \right)\\&=-\cot \left(-{\frac {\pi }{2}}+\theta \right)&&={\phantom {-}}\cot \left({\frac {3\pi }{2}}-\theta \derecha)&&=-\cot \izquierda(-{\frac {3\pi }{2}}+\theta \derecha)\\[0.3ex]\end{alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/316baee0254e64a99779ac4721054f23295aeec6)


















































![{\displaystyle {\begin{aligned}\arccos(x)&={\frac {\pi }{2}}-\arcsin(x)\\[0.5em]\operatorname {arccot}(x)&={\frac {\pi }{2}}-\arctan(x)\\[0.5em]\operatorname {arccsc}(x)&={\frac {\pi }{2}}-\operatorname {arcsec}(x)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec43798232f580abb074cf15f3d77692edd36af0)

![{\displaystyle {\begin{aligned}\arcsin \left({\frac {1}{x}}\right)&=\operadorname {arccsc}(x)&\\[0.3em]\operadorname {arccsc} \left({\frac {1}{x}}\right)&=\arcsin(x)&\\[0.3em]\arccos \left({\frac {1}{x}}\right)&=\operadorname {arcsec}(x)&\\[0.3em]\operadorname {arcsec} \left({\frac {1}{x}}\right)&=\arccos(x)&\\[0.3em]\arctan \left({\frac {1}{x}}\right)&=\operadorname {arccot}(x)&={\frac {\pi }{2}}-\arctan(x)\,,{\text{ si }}x>0\\[0.3em]\arctan \left({\frac {1}{x}}\right)&=\operadornombre {arccot}(x)-\pi &=-{\frac {\pi }{2}}-\arctan(x)\,,{\text{ si }}x<0\\[0.3em]\operadornombre {arccot} \left({\frac {1}{x}}\right)&=\arctan(x)&={\frac {\pi }{2}}-\operadornombre {arccot}(x)\,,{\text{ si }}x>0\\[0.3em]\operadornombre {arccot} \left({\frac {1}{x}}\right)&=\arctan(x)+\pi &={\frac {3\pi }{2}}-\operadornombre {arccot}(x)\,,{\text{ si }}x<0\end{alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2fca7d530f42c84ed92b5895ccbafb013dc6645)







![{\displaystyle {\begin{aligned}\arcsin(x)&=2\arctan \left({\frac {x}{1+{\sqrt {1-x^{2}}}}}\right)\\[0.5em]\arccos(x)&=2\arctan \left({\frac {\sqrt {1-x^{2}}}{1+x}}\right)\,,{\text{ si }}-1<x\leq 1\\[0.5em]\arctan(x)&=2\arctan \left({\frac {x}{1+{\sqrt {1+x^{2}}}}}\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7dd6a9370a877ca5e198e28b7582bd06b377bdc3)











![{\displaystyle {\begin{aligned}\arcsin(z)&=z+\left({\frac {1}{2}}\right){\frac {z^{3}}{3}}+\left({\frac {1\cdot 3}{2\cdot 4}}\right){\frac {z^{5}}{5}}+\left({\frac {1\cdot 3\cdot 5}{2\cdot 4\cdot 6}}\right){\frac {z^{7}}{7}}+\cdots \\[5pt]&=\sum _{n=0}^{\infty }{\frac {(2n-1)!!}{(2n)!!}}{\frac {z^{2n+1}}{2n+1}}\\[5pt]&=\sum _{n=0}^{\infty }{\frac {(2n)!}{(2^{n}n!)^{2}}}{\frac {z^{2n+1}}{2n+1}}\,;\qquad |z|\leq 1\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a0f778db7f760db059cf12f13ee5c2bf239fbb2f)









![{\displaystyle {\begin{aligned}\int \arcsin(z)\,dz&{}=z\,\arcsin(z)+{\sqrt {1-z^{2}}}+C\\\int \arccos(z)\,dz&{}=z\,\arccos(z)-{\sqrt {1-z^{2}}}+C\\\int \arctan(z)\,dz&{}=z\,\arctan(z)-{\frac {1}{2}}\ln \left(1+z^{2}\right)+C\\\int \operatorname {arccot}(z)\,dz&{}=z\,\operatorname {arccot}(z)+{\frac {1}{2}}\ln \left(1+z^{2}\right)+C\\\int \operatorname {arcsec}(z)\,dz&{}=z\,\nombre del operador {arcsec}(z)-\ln \left[z\left(1+{\sqrt {\frac {z^{2}-1}{z^{2}}}}\right)\right]+C\\\int \nombre del operador {arccsc}(z)\,dz&{}=z\,\nombre del operador {arccsc}(z)+\ln \left[z\left(1+{\sqrt {\frac {z^{2}-1}{z^{2}}}}\right)\right]+C\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3e2dde92bb82231c4326e45ce8b50e7298688bb)















![{\displaystyle {\begin{aligned}\arcsin(z)&{}=-i\ln \left({\sqrt {1-z^{2}}}+iz\right)=i\ln \left({\sqrt {1-z^{2}}}-iz\right)&{}=\operadorname {arccsc} \left({\frac {1}{z}}\right)\\[10pt]\arccos(z)&{}=-i\ln \left(i{\sqrt {1-z^{2}}}+z\right)={\frac {\pi }{2}}-\arcsin(z)&{}=\operadorname {arcsec} \left({\frac {1}{z}}\right)\\[10pt]\arctan(z)&{}=-{\frac {i}{2}}\ln \left({\frac {iz}{i+z}}\right)=-{\frac {i}{2}}\ln \left({\frac {1+iz}{1-iz}}\right)&{}=\nombreoperador {arccot} \left({\frac {1}{z}}\right)\\[10pt]\nombreoperador {arccot}(z)&{}=-{\frac {i}{2}}\ln \left({\frac {z+i}{zi}}\right)=-{\frac {i}{2}}\ln \left({\frac {iz-1}{iz+1}}\right)&{}=\arctan \left({\frac {1}{z}}\right)\\[10pt]\nombreoperador {arcsec}(z)&{}=-i\ln \left(i{\sqrt {1-{\frac {1}{z^{2}}}}}+{\frac {1}{z}}\right)={\frac {\pi }{2}}-\operadornombre {arccsc}(z)&{}=\arccos \left({\frac {1}{z}}\right)\\[10pt]\operadornombre {arccsc}(z)&{}=-i\ln \left({\sqrt {1-{\frac {1}{z^{2}}}}}+{\frac {i}{z}}\right)=i\ln \left({\sqrt {1-{\frac {1}{z^{2}}}}}-{\frac {i}{z}}\right)&{}=\arcsin \left({\frac {1}{z}}\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/13b511be341b52fcd0c0660f3a4b1e5a164bfcb1)












![{\displaystyle \operatorname {Im} \left(\ln z\right)\in (-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/781cef7f2317c18794eeaaddeef4073aadd51b75)





![{\displaystyle {\begin{aligned}z&={\frac {e^{i\phi }-e^{-i\phi }}{2i}}\\[10mu]2iz&=\xi -{\frac { 1}{\xi }}\\[5mu]0&=\xi ^{2}-2iz\xi -1\\[5mu]\xi &=iz\pm {\sqrt {1-z^{2}} }\\[5mu]\phi &=-i\ln \left(iz\pm {\sqrt {1-z^{2}}}\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ed03e8cf773fa44cc78823d65f7d82f41276fb96)


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
