Programa de guardabosques
 Nave espacial Ranger del bloque III | |
| Fabricante | Laboratorio de propulsión a chorro |
|---|---|
| País natal | Estados Unidos |
| Operador | NASA |
| Presupuesto | |
| Autobús | Bloque I, Bloque II, Bloque III |
| Producción | |
| Estado | Jubilado |
| Lanzado | 9 |
| Fallido | 5 |
| Lanzamiento inaugural | 23 de agosto de 1961 |
| Último lanzamiento | 21 de marzo de 1965 |
| Nave espacial relacionada | |
| Derivados | Marinero |
| Configuración | |
 Nave espacial Ranger del bloque II | |
{kind=link}
{kind=link}
{kind=link}

El programa Ranger fue una serie de misiones espaciales no tripuladas de los Estados Unidos en la década de 1960 cuyo objetivo era obtener las primeras imágenes de cerca de la superficie de la Luna . Las naves espaciales Ranger fueron diseñadas para tomar imágenes de la superficie lunar, transmitiendo esas imágenes a la Tierra hasta que la nave espacial se destruyera al impactar. Una serie de contratiempos, sin embargo, llevaron al fracaso de los primeros seis vuelos. En un momento dado, el programa se denominó "disparar y esperar". [1] El Congreso inició una investigación sobre "problemas de gestión" en la sede de la NASA y el Laboratorio de Propulsión a Chorro . [2] Después de dos reorganizaciones de las agencias, [ cita requerida ] el Ranger 7 devolvió imágenes con éxito en julio de 1964, seguido de dos misiones exitosas más.
El Ranger fue diseñado originalmente, a principios de 1959, en tres fases distintas, llamadas "bloques". Cada bloque tenía diferentes objetivos de misión y un diseño de sistema progresivamente más avanzado. Los diseñadores de la misión del JPL planearon múltiples lanzamientos en cada bloque, para maximizar la experiencia de ingeniería y el valor científico de la misión y para asegurar al menos un vuelo exitoso. Los costos totales de investigación, desarrollo, lanzamiento y soporte para la serie de naves espaciales Ranger (Rangers 1 a 9) fueron de aproximadamente $170 millones (equivalentes a $1.25 mil millones en 2023). [3]
Nave espacial Ranger
{kind=link}

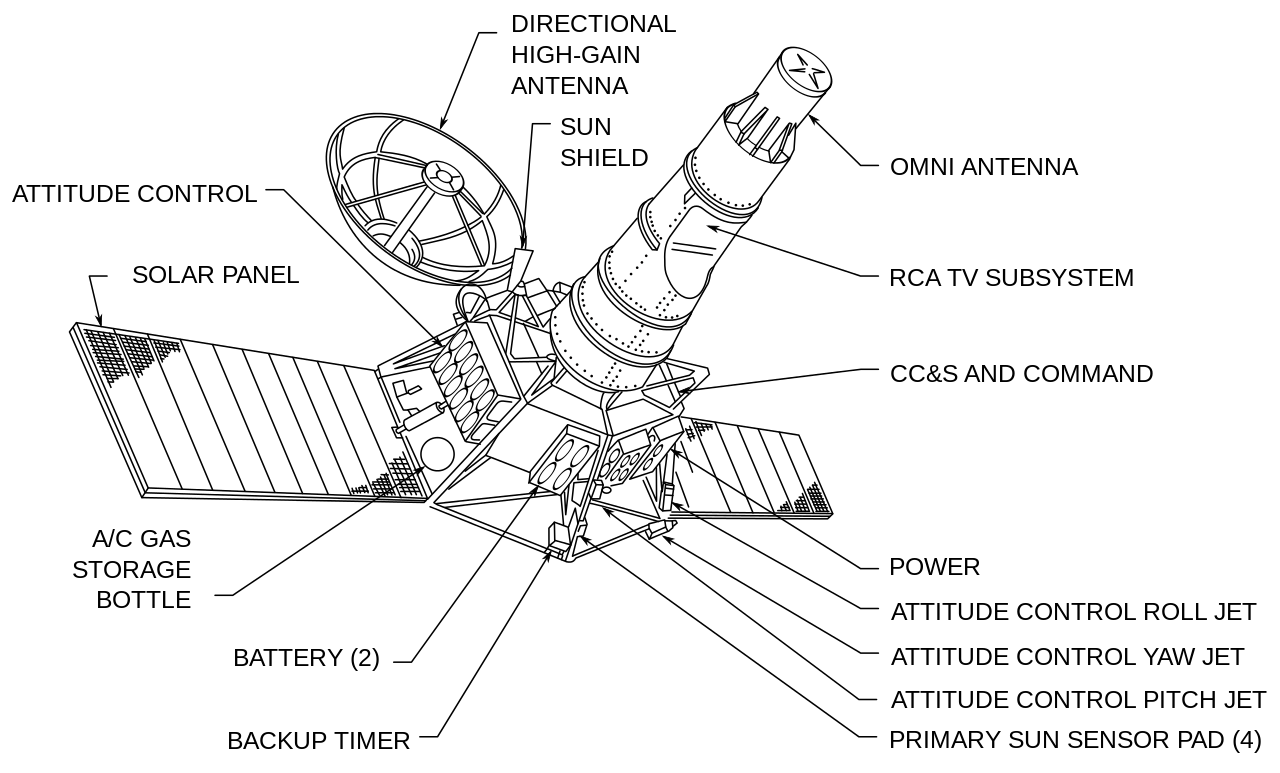
Cada una de las naves espaciales Ranger del bloque III tenía seis cámaras a bordo. Las cámaras eran básicamente las mismas con diferencias en los tiempos de exposición, campos de visión, lentes y velocidades de escaneo. El sistema de cámaras estaba dividido en dos canales, P (parcial) y F (completo). Cada canal era autónomo con fuentes de alimentación, temporizadores y transmisores separados. El canal F tenía dos cámaras: la cámara A de gran angular y la cámara B de ángulo estrecho. El canal P tenía cuatro cámaras: P1 y P2 (ángulo estrecho) y P3 y P4 (gran angular). La imagen final del canal F se tomó entre 2,5 y 5 segundos antes del impacto (altitud de unos 5 kilómetros (3,1 millas)) y la última imagen del canal P entre 0,2 y 0,4 segundos antes del impacto (altitud de unos 600 metros (2.000 pies)). Las imágenes proporcionaron una resolución mejor que la disponible en las vistas desde la Tierra por un factor de 1000. El diseño y la construcción de las cámaras fueron dirigidos por Leonard R. Malling. [4] [5] [6] [7] El director del programa Ranger para las primeras seis naves espaciales fue James D. Burke . [8]
Los preamplificadores de cámara del programa Ranger utilizaban Nuvistors . [9]
Lista de misiones
Misiones del bloque 1
{kind=link}

- Ranger 1 , lanzado el 23 de agosto de 1961, prototipo lunar, lanzamiento fallido
- Ranger 2 , lanzado el 18 de noviembre de 1961, prototipo lunar, lanzamiento fallido
El bloque 1, formado por dos naves espaciales lanzadas a la órbita terrestre en 1961, estaba destinado a probar el vehículo de lanzamiento Atlas-Agena y el equipo de la nave espacial sin intentar llegar a la Luna.
Los problemas con la primera versión del vehículo de lanzamiento dejaron a Ranger 1 y Ranger 2 en órbitas terrestres bajas de corta duración en las que las naves espaciales no podían estabilizarse, recolectar energía solar o sobrevivir por mucho tiempo. En 1962, el JPL utilizó el diseño de Ranger 1 y Ranger 2 para las sondas de espacio profundo Mariner 1 y Mariner 2 , que fracasaron y que tuvieron éxito , y las que fueron enviadas a Venus .
Misiones del bloque 2
{kind=link}

- Ranger 3 , lanzada el 26 de enero de 1962, sonda lunar, nave espacial falló, no tocó la Luna
- Ranger 4 , lanzado el 23 de abril de 1962, sonda lunar, nave espacial fallida, impacto en la Luna
- Ranger 5 , lanzada el 18 de octubre de 1962, sonda lunar, nave espacial falló, no tocó la Luna
El bloque 2 del proyecto Ranger lanzó tres naves espaciales a la Luna en 1962, que transportaban una cámara de televisión, un detector de radiación y un sismómetro en una cápsula separada, desacelerada por un motor de cohete y empaquetada para sobrevivir a su impacto a baja velocidad en la superficie de la Luna. La nave pesaba 331 kg. Las tres misiones en conjunto demostraron un buen rendimiento del vehículo de lanzamiento Atlas/Agena B y la idoneidad del diseño de la nave espacial, pero desafortunadamente no ambas en el mismo intento. El Ranger 3 tuvo problemas tanto con el vehículo de lanzamiento como con la nave espacial, se perdió la Luna por unos 36.800 km y ha estado orbitando alrededor del Sol desde entonces. El Ranger 4 tuvo un lanzamiento perfecto, pero la nave espacial quedó completamente inutilizada. El equipo del proyecto rastreó la cápsula del sismómetro hasta el impacto justo fuera de la vista en el lado lejano lunar , validando el sistema de comunicaciones y navegación. El Ranger 5 no tocó la Luna y quedó inutilizado. No se obtuvo información científica significativa de estas misiones.
Hacia el final del Bloque 2, se descubrió que un tipo de diodo utilizado en misiones anteriores producía un descascarillado problemático de la placa de oro en las condiciones del espacio. Esto puede haber sido responsable de algunas de las fallas. [10]
Misiones del bloque 3
- Ranger 6 , lanzado el 30 de enero de 1964, sonda lunar, impacto en la Luna, falla de las cámaras
- Guardabosques 7
- Lanzado el 28 de julio de 1964
- Impacto de la Luna el 31 de julio de 1964 a las 13:25:49 UT
- 10°21′S 20°35′W / 10,35°S 20,58°W / -10,35; -20,58 (Ranger 7) - Mare Cognitum
- Guardabosques 8
- Lanzado el 17 de febrero de 1965
- Impacto de la Luna el 20 de febrero de 1965 a las 09:57:37 UT
- 2°40′N 24°39′E / 2,67°N 24,65°E / 2,67; 24,65 (Ranger 8) - Mare Tranquillitatis (Mar de la Tranquilidad)
- Guardabosques 9
- Lanzado el 21 de marzo de 1965
- Impacto de la Luna el 24 de marzo de 1965 a las 14:08:20 UT
- 12°50′S 2°22′O / 12.83, -12.83; -2.37 (Ranger 9) - Cráter Alphonsus
El bloque 3 de la Ranger incorporó cuatro lanzamientos en 1964-65. Estas naves espaciales contaban con un instrumento de televisión diseñado para observar la superficie lunar durante la aproximación; a medida que la nave espacial se acercaba a la Luna, revelaba detalles más pequeños que los que podían mostrar los mejores telescopios terrestres y, finalmente, cráteres del tamaño de un plato de comida . [11] La primera de la nueva serie, la Ranger 6 , tuvo un vuelo impecable, excepto que el sistema de televisión se desactivó por un accidente en vuelo y no pudo tomar fotografías.
Los tres Rangers siguientes, con un televisor rediseñado, tuvieron un éxito total. El Ranger 7 fotografió su camino hacia el objetivo en una llanura lunar, pronto llamada Mare Cognitum , al sur del cráter Copernicus . Envió más de 4.300 fotografías de seis cámaras a los científicos e ingenieros que esperaban. Las nuevas imágenes revelaron que los cráteres causados por el impacto eran las características dominantes de la superficie de la Luna, incluso en las llanuras aparentemente lisas y vacías. Los cráteres grandes estaban marcados por otros pequeños, y estos últimos con diminutas marcas de impacto, tan pequeñas como se podía discernir, de unos 50 centímetros (20 pulgadas). Las rayas de color claro que irradiaban de Copernicus y algunos otros cráteres grandes resultaron ser cadenas y redes de pequeños cráteres y escombros expulsados en los impactos primarios.
En febrero de 1965, el Ranger 8 desplazó un curso oblicuo sobre el sur del Oceanus Procellarum y el Mare Nubium , para estrellarse en el Mare Tranquillitatis, a unos 70 kilómetros (43 millas) de distancia de donde aterrizaría el Apolo 11 4 años y medio después. Fueron necesarias más de 7000 imágenes, cubriendo un área más amplia y reforzando las conclusiones del Ranger 7. Aproximadamente un mes después, el Ranger 9 descendió en el cráter Alphonsus , de 90 kilómetros (56 millas) de diámetro . Sus 5800 imágenes, anidadas concéntricamente y aprovechando la luz solar de nivel muy bajo, proporcionaron una fuerte confirmación de los contornos suavemente ondulados de cráter sobre cráter de la superficie lunar.
Véase también
- Programa Apolo
- Programa Luna
- Programa Orbitador Lunar
- Programa pionero
- Programa de topografía
- Cronología de la exploración del sistema solar
Referencias
- ^ Historia oral de Cortright (pág. 25)
- ^ Dick, Steven J. "Los primeros 50 años de la NASA: perspectivas históricas" (PDF) . history.nasa.gov . NASA. p. 12 . Consultado el 17 de junio de 2019 .
- ^ Johnston, Louis; Williamson, Samuel H. (2023). "¿Cuál era el PIB de Estados Unidos en ese momento?". MeasuringWorth . Consultado el 30 de noviembre de 2023 .Las cifras del deflactor del producto interno bruto de Estados Unidos siguen la serie de MeasuringWorth .
- ^ Jet Propulsion Laboratory - Malling, LR (1962). Fotografía planetaria: cámara de televisión para un estudio geológico del planeta Marte (PDF) (Informe). NASA-JPL.
- ^ Jet Propulsion Laboratory - Malling, LR (1963). Astronomía espacial y el sistema vidicón de barrido lento (PDF) (Informe). NASA-JPL.
- ^ Jet Propulsion Laboratory - Malling, LR (1966). Patente de sistema de control de cámara de televisión digital (PDF) (Informe). NASA-JPL.
- ^ Jet Propulsion Laboratory - Malling, LR (1968). Sistema de comunicación por vídeo de ancho de banda reducido que utiliza técnicas de muestreo. Patente (PDF) (Informe). NASA-JPL.
- ^ "IMPACTO LUNAR: Una historia del Proyecto Ranger, Parte I. El Ranger original, Capítulo dos - ORGANIZACIÓN DE LA CAMPAÑA". Historia de la NASA . NASA . Consultado el 14 de julio de 2016 .
- ^ Válvulas Nuvistor de Stef Niewiadomski.
- ^ "capítulo 8".
- ^ "La vista desde el Ranger". NASA-JPL. 1961. pág. 47.
Enlaces externos
- Impacto lunar: una historia del Proyecto Ranger (PDF) 1977
- Impacto lunar: una historia del Proyecto Ranger (HTML)
Ambos enlaces llevan a un libro completo sobre el programa. Para el HTML, desplácese hacia abajo para ver el enlace de la tabla de contenidos.
- Página del programa Ranger de la NASA Solar System Exploration
- Explorando la Luna: El Programa Ranger
- Fotografía de la Luna por parte de guardabosques Instituto Lunar y Planetario
- Publicaciones de la serie de historia de la NASA (muchas de las cuales están en línea)
