Problema de Apolonio


En geometría del plano euclidiano , el problema de Apolonio es construir círculos que sean tangentes a tres círculos dados en un plano (Figura 1). Apolonio de Perga (c. 262 a. C. – c. 190 a. C.) planteó y resolvió este famoso problema en su obra Ἐπαφαί ( Epaphaí , "Tangencies"); esta obra se ha perdido , pero ha sobrevivido un informe del siglo IV d. C. de sus resultados realizado por Pappus de Alejandría . Tres círculos dados tienen genéricamente ocho círculos diferentes que son tangentes a ellos (Figura 2), un par de soluciones para cada forma de dividir los tres círculos dados en dos subconjuntos (hay 4 formas de dividir un conjunto de cardinalidad 3 en 2 partes).
En el siglo XVI, Adriaan van Roomen resolvió el problema utilizando hipérbolas que se intersectan , pero esta solución no utiliza únicamente construcciones con regla y compás . François Viète encontró una solución de este tipo explotando casos límite : cualquiera de los tres círculos dados puede reducirse a radio cero (un punto) o expandirse a radio infinito (una línea). El enfoque de Viète, que utiliza casos límite más simples para resolver los más complicados, se considera una reconstrucción plausible del método de Apolonio. El método de van Roomen fue simplificado por Isaac Newton , quien demostró que el problema de Apolonio es equivalente a encontrar una posición a partir de las diferencias de sus distancias a tres puntos conocidos. Esto tiene aplicaciones en sistemas de navegación y posicionamiento como LORAN .
Los matemáticos posteriores introdujeron métodos algebraicos, que transforman un problema geométrico en ecuaciones algebraicas . Estos métodos se simplificaron explotando las simetrías inherentes al problema de Apolonio: por ejemplo, los círculos solución se dan genéricamente en pares, con una solución que encierra los círculos dados que la otra excluye (Figura 2). Joseph Diaz Gergonne utilizó esta simetría para proporcionar una elegante solución de regla y compás, mientras que otros matemáticos utilizaron transformaciones geométricas como la reflexión en un círculo para simplificar la configuración de los círculos dados. Estos desarrollos proporcionan un entorno geométrico para los métodos algebraicos (utilizando la geometría de esferas de Lie ) y una clasificación de soluciones según 33 configuraciones esencialmente diferentes de los círculos dados.
El problema de Apolonio ha estimulado mucho más trabajo. Se han estudiado generalizaciones a tres dimensiones (construir una esfera tangente a cuatro esferas dadas) y más allá . La configuración de tres círculos mutuamente tangentes ha recibido especial atención. René Descartes dio una fórmula que relaciona los radios de los círculos solución y los círculos dados, ahora conocida como el teorema de Descartes . Resolver el problema de Apolonio de forma iterativa en este caso conduce a la junta apolínea , que es uno de los primeros fractales que se describieron en forma impresa y es importante en la teoría de números a través de los círculos de Ford y el método del círculo de Hardy-Littlewood .
Planteamiento del problema
El enunciado general del problema de Apolonio es construir uno o más círculos que sean tangentes a tres objetos dados en un plano, donde un objeto puede ser una línea, un punto o un círculo de cualquier tamaño. [1] [2] [3] [4] Estos objetos pueden estar dispuestos de cualquier manera y pueden cruzarse entre sí; sin embargo, generalmente se los considera distintos, lo que significa que no coinciden. Las soluciones al problema de Apolonio a veces se denominan círculos de Apolonio , aunque el término también se usa para otros tipos de círculos asociados con Apolonio.
La propiedad de tangencia se define de la siguiente manera. En primer lugar, se supone que un punto, una línea o un círculo es tangente a sí mismo; por lo tanto, si un círculo dado ya es tangente a los otros dos objetos dados, se cuenta como una solución al problema de Apolonio. Se dice que dos objetos geométricos distintos se intersecan si tienen un punto en común. Por definición, un punto es tangente a un círculo o una línea si los interseca, es decir, si se encuentra sobre ellos; por lo tanto, dos puntos distintos no pueden ser tangentes. Si el ángulo entre líneas o círculos en un punto de intersección es cero, se dice que son tangentes ; el punto de intersección se llama punto tangente o punto de tangencia . (La palabra "tangente" deriva del participio presente latino , tangens , que significa "tocar".) En la práctica, dos círculos distintos son tangentes si se intersecan en un solo punto; si se intersecan en cero o en dos puntos, no son tangentes. Lo mismo es válido para una línea y un círculo. Dos líneas distintas no pueden ser tangentes en el plano, aunque dos líneas paralelas pueden considerarse tangentes en un punto en el infinito en geometría inversa (ver más abajo). [5] [6]
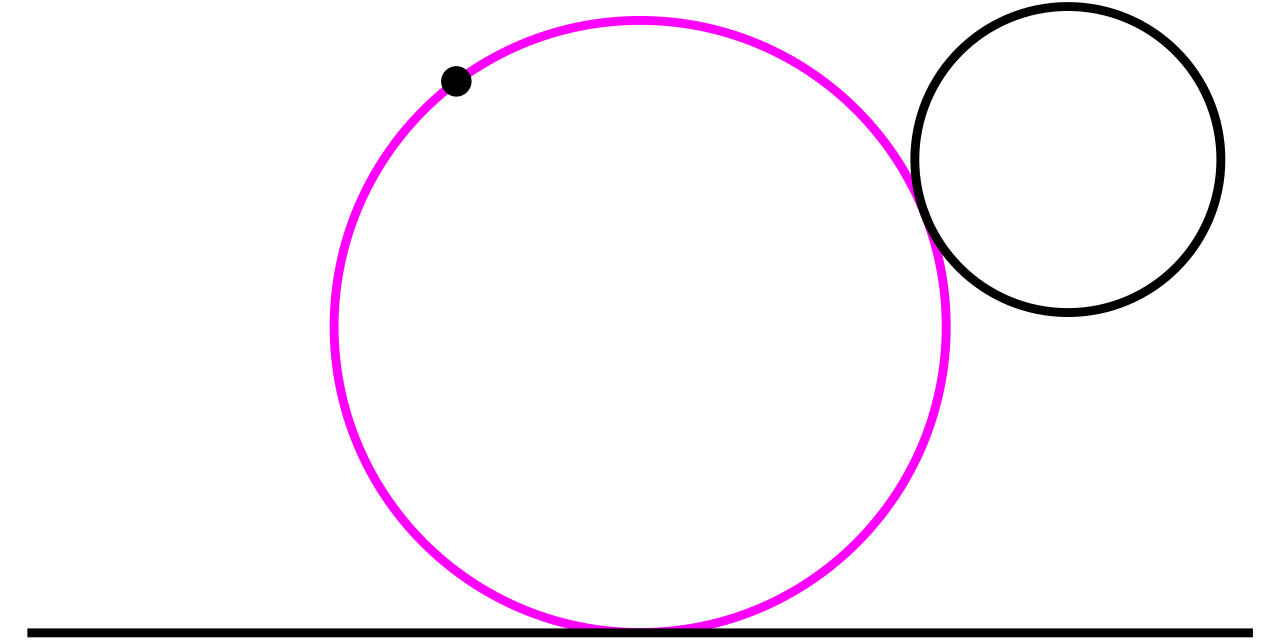
El círculo solución puede ser interna o externamente tangente a cada uno de los círculos dados. Una tangencia externa es aquella en la que los dos círculos se curvan alejándose uno del otro en su punto de contacto; se encuentran en lados opuestos de la línea tangente en ese punto, y se excluyen entre sí. La distancia entre sus centros es igual a la suma de sus radios. Por el contrario, una tangencia interna es aquella en la que los dos círculos se curvan de la misma manera en su punto de contacto; los dos círculos se encuentran en el mismo lado de la línea tangente, y un círculo encierra al otro. En este caso, la distancia entre sus centros es igual a la diferencia de sus radios. A modo de ilustración, en la Figura 1, el círculo solución rosa es internamente tangente al círculo negro dado de tamaño mediano de la derecha, mientras que es externamente tangente a los círculos dados más pequeño y más grande de la izquierda.
El problema de Apolonio también puede formularse como el problema de localizar uno o más puntos tales que las diferencias de sus distancias a tres puntos dados sean iguales a tres valores conocidos. Considérese un círculo solución de radio r s y tres círculos dados de radios r 1 , r 2 y r 3 . Si el círculo solución es tangente externamente a los tres círculos dados, las distancias entre el centro del círculo solución y los centros de los círculos dados son iguales a d 1 = r 1 + r s , d 2 = r 2 + r s y d 3 = r 3 + r s , respectivamente. Por lo tanto, las diferencias en estas distancias son constantes, como d 1 − d 2 = r 1 − r 2 ; dependen solo de los radios conocidos de los círculos dados y no del radio r s del círculo solución, que se cancela. Esta segunda formulación del problema de Apolonio se puede generalizar a círculos de solución tangentes internamente (para los cuales la distancia centro-centro es igual a la diferencia de radios), cambiando las diferencias de distancias correspondientes a sumas de distancias, de modo que el radio del círculo de solución r s se cancele nuevamente. La reformulación en términos de distancias centro-centro es útil en las soluciones a continuación de Adriaan van Roomen e Isaac Newton , y también en el posicionamiento hiperbólico o trilateración, que es la tarea de localizar una posición a partir de diferencias en distancias a tres puntos conocidos. Por ejemplo, los sistemas de navegación como LORAN identifican la posición de un receptor a partir de las diferencias en los tiempos de llegada de las señales desde tres posiciones fijas, que corresponden a las diferencias en las distancias a esos transmisores. [7] [8]
Historia
Se ha desarrollado un rico repertorio de métodos geométricos y algebraicos para resolver el problema de Apolonio, [9] [10] que ha sido llamado "el más famoso de todos" los problemas de geometría. [3] El enfoque original de Apolonio de Perga se ha perdido, pero François Viète y otros han ofrecido reconstrucciones basadas en las pistas de la descripción de Pappus de Alejandría . [11] [12] El primer método de solución nuevo fue publicado en 1596 por Adriaan van Roomen , quien identificó los centros de los círculos de solución como los puntos de intersección de dos hipérbolas . [13] [14] El método de van Roomen fue refinado en 1687 por Isaac Newton en sus Principia , [15] [16] y por John Casey en 1881. [17]
Aunque tuvo éxito en la solución del problema de Apolonio, el método de van Roomen tiene un inconveniente. Una propiedad apreciada en la geometría euclidiana clásica es la capacidad de resolver problemas utilizando solo un compás y una regla . [18] Muchas construcciones son imposibles utilizando solo estas herramientas, como dividir un ángulo en tres partes iguales . Sin embargo, muchos de estos problemas "imposibles" se pueden resolver mediante la intersección de curvas como hipérbolas, elipses y parábolas ( secciones cónicas ). Por ejemplo, duplicar el cubo (el problema de construir un cubo del doble del volumen de un cubo dado) no se puede hacer utilizando solo una regla y un compás, pero Menecmo demostró que el problema se puede resolver utilizando las intersecciones de dos parábolas . [19] Por lo tanto, la solución de van Roomen, que utiliza la intersección de dos hipérbolas, no determinó si el problema satisfacía la propiedad de la regla y el compás.
El amigo de van Roomen, François Viète , que había instado a van Roomen a trabajar en el problema de Apolonio en primer lugar, desarrolló un método que utilizaba solo regla y compás. [20] Antes de la solución de Viète, Regiomontanus dudaba de que el problema de Apolonio pudiera resolverse con regla y compás. [21] Viète resolvió primero algunos casos especiales simples del problema de Apolonio, como encontrar un círculo que pase por tres puntos dados que tenga solo una solución si los puntos son distintos; luego pasó a resolver casos especiales más complicados, en algunos casos encogiendo o agrandando los círculos dados. [1] Según el informe del siglo IV de Pappus, el propio libro de Apolonio sobre este problema, titulado Ἐπαφαί ( Epaphaí , "Tangencies"; latín: De tactionibus , De contactibus ), siguió un enfoque progresivo similar. [11] Por lo tanto, la solución de Viète se considera una reconstrucción plausible de la solución de Apolonio, aunque otras reconstrucciones han sido publicadas independientemente por tres autores diferentes. [22]
En el siglo XIX se desarrollaron otras soluciones geométricas al problema de Apolonio. Las soluciones más notables son las de Jean-Victor Poncelet (1811) [23] y las de Joseph Diaz Gergonne (1814). [24] Mientras que la prueba de Poncelet se basa en centros homotéticos de círculos y en el teorema de potencia de un punto , el método de Gergonne explota la relación conjugada entre líneas y sus polos en un círculo. Los métodos que utilizan la inversión del círculo fueron iniciados por Julius Petersen en 1879; [25] un ejemplo es el método de solución anular de HSM Coxeter . [2] Otro enfoque utiliza la geometría de esfera de Lie , [26] que fue desarrollada por Sophus Lie .
Las soluciones algebraicas al problema de Apolonio fueron iniciadas en el siglo XVII por René Descartes y la princesa Isabel de Bohemia , aunque sus soluciones eran bastante complejas. [9] Los métodos algebraicos prácticos fueron desarrollados a finales del siglo XVIII y en el siglo XIX por varios matemáticos, entre ellos Leonhard Euler , [27] Nicolas Fuss , [9] Carl Friedrich Gauss , [28] Lazare Carnot , [29] y Augustin Louis Cauchy . [30]
Métodos de solución
Hipérbolas que se cruzan

La solución de Adriaan van Roomen (1596) se basa en la intersección de dos hipérbolas . [13] [14] Sean los círculos dados C 1 , C 2 y C 3 . Van Roomen resolvió el problema general resolviendo un problema más simple, el de encontrar los círculos que son tangentes a dos círculos dados, como C 1 y C 2 . Observó que el centro de un círculo tangente a ambos círculos dados debe estar en una hipérbola cuyos focos sean los centros de los círculos dados. Para entender esto, sean los radios del círculo solución y los dos círculos dados los que se denoten como r s , r 1 y r 2 , respectivamente (Figura 3). La distancia d 1 entre los centros del círculo solución y C 1 es r s + r 1 o r s − r 1 , dependiendo de si estos círculos se eligen para que sean tangentes externa o internamente, respectivamente. De manera similar, la distancia d 2 entre los centros del círculo solución y C 2 es r s + r 2 o r s − r 2 , nuevamente dependiendo de su tangencia elegida. Por lo tanto, la diferencia d 1 − d 2 entre estas distancias es siempre una constante que es independiente de r s . Esta propiedad, de tener una diferencia fija entre las distancias a los focos , caracteriza a las hipérbolas, por lo que los posibles centros del círculo solución se encuentran en una hipérbola. Se puede dibujar una segunda hipérbola para el par de círculos dados C 2 y C 3 , donde la tangencia interna o externa de la solución y C 2 debe elegirse de manera consistente con la de la primera hipérbola. Una intersección de estas dos hipérbolas (si la hay) da el centro de un círculo solución que tiene las tangencias internas y externas elegidas a los tres círculos dados. El conjunto completo de soluciones al problema de Apolonio se puede encontrar considerando todas las combinaciones posibles de tangencia interna y externa del círculo solución a los tres círculos dados.
Isaac Newton (1687) refinó la solución de van Roomen, de modo que los centros del círculo solución se localizaron en las intersecciones de una línea con un círculo. [15] Newton formula el problema de Apolonio como un problema de trilateración : localizar un punto Z a partir de tres puntos dados A , B y C , de modo que las diferencias en distancias desde Z a los tres puntos dados tengan valores conocidos. [31] Estos cuatro puntos corresponden al centro del círculo solución ( Z ) y a los centros de los tres círculos dados ( A , B y C ).

En lugar de resolver las dos hipérbolas, Newton construye sus líneas directriz . Para cualquier hipérbola, la relación de las distancias desde un punto Z a un foco A y a la directriz es una constante fija llamada excentricidad . Las dos directrices se intersecan en un punto T y, a partir de sus dos relaciones de distancias conocidas, Newton construye una línea que pasa por T en la que debe estar Z. Sin embargo, la relación de las distancias TZ/TA también es conocida; por lo tanto, Z también se encuentra en un círculo conocido, ya que Apolonio había demostrado que un círculo puede definirse como el conjunto de puntos que tienen una relación dada de distancias a dos puntos fijos. (Aparte, esta definición es la base de las coordenadas bipolares ). Por lo tanto, las soluciones al problema de Apolonio son las intersecciones de una línea con un círculo.
La reconstrucción de Viète
Como se describe a continuación, el problema de Apolonio tiene diez casos especiales, dependiendo de la naturaleza de los tres objetos dados, que pueden ser un círculo ( C ), una línea ( L ) o un punto ( P ). Por costumbre, estos diez casos se distinguen por códigos de tres letras como CCP . [32] Viète resolvió los diez casos utilizando únicamente construcciones con regla y compás, y utilizó las soluciones de los casos más simples para resolver los casos más complejos. [1] [20]

Viète comenzó resolviendo el caso PPP (tres puntos) siguiendo el método de Euclides en sus Elementos . A partir de esto, derivó un lema correspondiente al teorema de la potencia de un punto , que utilizó para resolver el caso LPP (una línea y dos puntos). Siguiendo a Euclides por segunda vez, Viète resolvió el caso LLL (tres líneas) utilizando las bisectrices de los ángulos . Luego derivó un lema para construir la línea perpendicular a una bisectriz de un ángulo que pasa por un punto, que utilizó para resolver el problema LLP (dos líneas y un punto). Esto explica los primeros cuatro casos del problema de Apolonio, aquellos que no involucran círculos.
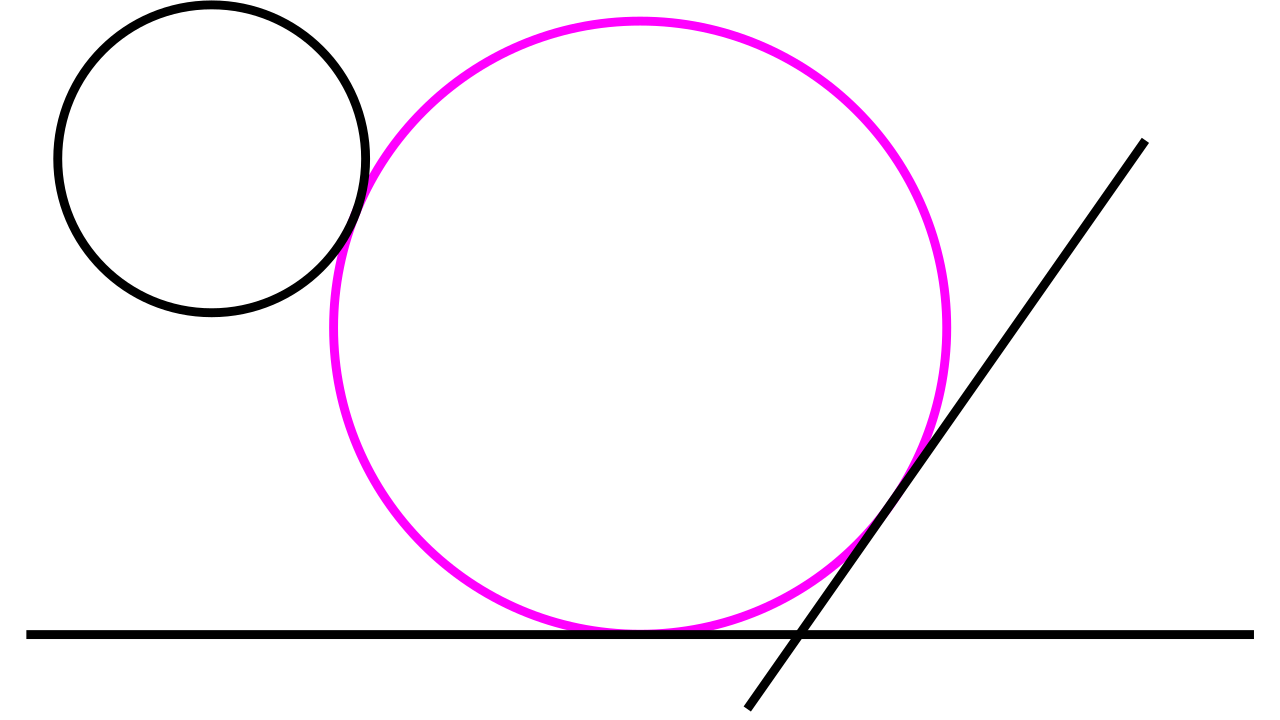
Para resolver los problemas restantes, Viète explotó el hecho de que los círculos dados y el círculo solución pueden redimensionarse en tándem mientras se conservan sus tangencias (Figura 4). Si el radio del círculo solución se modifica en una cantidad Δ r , el radio de sus círculos dados tangentes internamente debe modificarse asimismo en Δ r , mientras que el radio de sus círculos dados tangentes externamente debe modificarse en −Δ r . Por lo tanto, a medida que el círculo solución se expande, los círculos dados tangentes internamente deben expandirse en tándem, mientras que los círculos dados tangentes externamente deben encogerse, para mantener sus tangencias.
Viète utilizó este enfoque para reducir uno de los círculos dados a un punto, reduciendo así el problema a un caso más simple, ya resuelto. Primero resolvió el caso CLL (un círculo y dos líneas) reduciendo el círculo a un punto, convirtiéndolo en un caso LLP . Luego resolvió el caso CLP (un círculo, una línea y un punto) utilizando tres lemas. Nuevamente reduciendo un círculo a un punto, Viète transformó el caso CCL en un caso CLP . Luego resolvió el caso CPP (un círculo y dos puntos) y el caso CCP (dos círculos y un punto), este último caso mediante dos lemas. Finalmente, Viète resolvió el caso CCC general (tres círculos) reduciendo un círculo a un punto, convirtiéndolo en un caso CCP .
Soluciones algebraicas
El problema de Apolonio puede formularse como un sistema de tres ecuaciones para el centro y el radio del círculo solución. [33] Dado que los tres círculos dados y cualquier círculo solución deben estar en el mismo plano, sus posiciones pueden especificarse en términos de las coordenadas ( x , y ) de sus centros. Por ejemplo, las posiciones centrales de los tres círculos dados pueden escribirse como ( x 1 , y 1 ), ( x 2 , y 2 ) y ( x 3 , y 3 ), mientras que la de un círculo solución puede escribirse como ( x s , y s ). De manera similar, los radios de los círculos dados y de un círculo solución pueden escribirse como r 1 , r 2 , r 3 y r s , respectivamente. El requisito de que un círculo solución debe tocar exactamente cada uno de los tres círculos dados puede expresarse como tres ecuaciones cuadráticas acopladas para x s , y s y r s :



Los tres números s 1 , s 2 y s 3 del lado derecho , llamados signos, pueden ser iguales a ±1 y especifican si el círculo de solución deseado debe tocar el círculo dado correspondiente internamente ( s = 1) o externamente ( s = −1). Por ejemplo, en las Figuras 1 y 4, la solución rosa es internamente tangente al círculo dado de tamaño mediano de la derecha y externamente tangente a los círculos dados más pequeño y más grande de la izquierda; si los círculos dados se ordenan por radio, los signos para esta solución son "− + −" . Dado que los tres signos pueden elegirse independientemente, hay ocho conjuntos posibles de ecuaciones (2 × 2 × 2 = 8) , cada conjunto correspondiente a uno de los ocho tipos de círculos de solución.
El sistema general de tres ecuaciones se puede resolver por el método de las resultantes . Cuando se multiplican, las tres ecuaciones tienen x s 2 + y s 2 en el lado izquierdo y r s 2 en el lado derecho. Al restar una ecuación de otra se eliminan estos términos cuadráticos; los términos lineales restantes se pueden reorganizar para obtener fórmulas para las coordenadas x s e y s


donde M , N , P y Q son funciones conocidas de los círculos dados y la elección de los signos. La sustitución de estas fórmulas en una de las tres ecuaciones iniciales da una ecuación cuadrática para r s , que se puede resolver mediante la fórmula cuadrática . La sustitución del valor numérico de r s en las fórmulas lineales produce los valores correspondientes de x s e y s .
Los signos s 1 , s 2 y s 3 en los lados derechos de las ecuaciones pueden elegirse de ocho maneras posibles, y cada elección de signos da hasta dos soluciones, ya que la ecuación para r s es cuadrática . Esto podría sugerir (incorrectamente) que hay hasta dieciséis soluciones del problema de Apolonio. Sin embargo, debido a una simetría de las ecuaciones, si ( r s , x s , y s ) es una solución, con signos s i , entonces también lo es (− r s , x s , y s ), con signos opuestos − s i , que representa el mismo círculo solución. Por lo tanto, el problema de Apolonio tiene como máximo ocho soluciones independientes (Figura 2). Una forma de evitar este doble conteo es considerar solo círculos solución con radio no negativo.
Las dos raíces de cualquier ecuación cuadrática pueden ser de tres tipos posibles: dos números reales diferentes , dos números reales idénticos (es decir, una raíz doble degenerada) o un par de raíces conjugadas complejas . El primer caso corresponde a la situación habitual; cada par de raíces corresponde a un par de soluciones que están relacionadas por inversión de círculo , como se describe a continuación (Figura 6). En el segundo caso, ambas raíces son idénticas, lo que corresponde a un círculo solución que se transforma en sí mismo bajo inversión. En este caso, uno de los círculos dados es en sí mismo una solución al problema de Apolonio, y el número de soluciones distintas se reduce en uno. El tercer caso de radios conjugados complejos no corresponde a una solución geométricamente posible para el problema de Apolonio, ya que un círculo solución no puede tener un radio imaginario; por lo tanto, el número de soluciones se reduce en dos. El problema de Apolonio no puede tener siete soluciones, aunque puede tener cualquier otro número de soluciones de cero a ocho. [12] [34]
Geometría de esfera de Lie
Las mismas ecuaciones algebraicas se pueden derivar en el contexto de la geometría de esferas de Lie . [26] Esa geometría representa círculos, líneas y puntos de una manera unificada, como un vector de cinco dimensiones X = ( v , c x , c y , w , sr ), donde c = ( c x , c y ) es el centro del círculo y r es su radio (no negativo). Si r no es cero, el signo s puede ser positivo o negativo; para visualización, s representa la orientación del círculo, con círculos en sentido antihorario que tienen un s positivo y círculos en sentido horario que tienen un s negativo . El parámetro w es cero para una línea recta y uno en caso contrario.
En este mundo de cinco dimensiones, existe un producto bilineal similar al producto escalar :

La cuádrica de Lie se define como aquellos vectores cuyo producto consigo mismos (su norma cuadrada ) es cero, ( X | X ) = 0. Sean X 1 y X 2 dos vectores pertenecientes a esta cuádrica; la norma de su diferencia es igual a

El producto se distribuye en la suma y la resta (más precisamente, es bilineal ):

Dado que ( X 1 | X 1 ) = ( X 2 | X 2 ) = 0 (ambos pertenecen a la cuádrica de Lie) y dado que w 1 = w 2 = 1 para círculos, el producto de cualesquiera dos vectores de este tipo en la cuádrica es igual a

donde las barras verticales que encierran c 1 − c 2 representan la longitud de ese vector de diferencia, es decir, la norma euclidiana . Esta fórmula muestra que si dos vectores cuadráticos X 1 y X 2 son ortogonales (perpendiculares) entre sí, es decir, si ( X 1 | X 2 ) = 0, entonces sus círculos correspondientes son tangentes. Porque si los dos signos s 1 y s 2 son iguales (es decir, los círculos tienen la misma "orientación"), los círculos son internamente tangentes; la distancia entre sus centros es igual a la diferencia en los radios.

Por el contrario, si los dos signos s 1 y s 2 son diferentes (es decir, los círculos tienen "orientaciones" opuestas), los círculos son externamente tangentes; la distancia entre sus centros es igual a la suma de los radios.

Por lo tanto, el problema de Apolonio puede reformularse en la geometría de Lie como un problema de encontrar vectores perpendiculares en la cuádrica de Lie; específicamente, el objetivo es identificar los vectores solución X sol que pertenecen a la cuádrica de Lie y también son ortogonales (perpendiculares) a los vectores X 1 , X 2 y X 3 correspondientes a los círculos dados.

La ventaja de esta reformulación es que se pueden aprovechar los teoremas del álgebra lineal sobre el número máximo de vectores linealmente independientes y simultáneamente perpendiculares. Esto proporciona otra forma de calcular el número máximo de soluciones y extender el teorema a espacios de dimensiones superiores. [26] [35]
Métodos inversos

Un escenario natural para el problema de Apolonio es la geometría inversa . [4] [12] La estrategia básica de los métodos inversos es transformar un problema de Apolonio dado en otro problema de Apolonio que sea más simple de resolver; las soluciones al problema original se encuentran a partir de las soluciones del problema transformado deshaciendo la transformación. Las transformaciones candidatas deben cambiar un problema de Apolonio en otro; por lo tanto, deben transformar los puntos, círculos y líneas dados en otros puntos, círculos y líneas, y ninguna otra forma. La inversión del círculo tiene esta propiedad y permite que el centro y el radio del círculo de inversión se elijan juiciosamente. Otros candidatos incluyen las isometrías del plano euclidiano ; sin embargo, no simplifican el problema, ya que simplemente desplazan , rotan y reflejan el problema original.
La inversión en un círculo con centro O y radio R consiste en la siguiente operación (Figura 5): cada punto P se mapea en un nuevo punto P' tal que O , P y P' son colineales, y el producto de las distancias de P y P' al centro O es igual al radio R al cuadrado.

Por lo tanto, si P se encuentra fuera del círculo, entonces P' se encuentra dentro, y viceversa. Cuando P es igual a O , se dice que la inversión envía P al infinito. (En el análisis complejo , "infinito" se define en términos de la esfera de Riemann ). La inversión tiene la propiedad útil de que las líneas y los círculos siempre se transforman en líneas y círculos, y los puntos siempre se transforman en puntos. Los círculos generalmente se transforman en otros círculos bajo inversión; sin embargo, si un círculo pasa por el centro del círculo de inversión, se transforma en una línea recta, y viceversa. Es importante destacar que, si un círculo cruza el círculo de inversión en ángulos rectos (se interseca perpendicularmente), la inversión lo deja sin cambios; se transforma en sí mismo.
Las inversiones de círculo corresponden a un subconjunto de las transformaciones de Möbius en la esfera de Riemann . El problema de Apolonio planar se puede transferir a la esfera mediante una proyección estereográfica inversa ; por lo tanto, las soluciones del problema de Apolonio planar también se aplican a su contraparte en la esfera. Son posibles otras soluciones inversas al problema planar además de las comunes que se describen a continuación. [36]
Pares de soluciones por inversión

Las soluciones al problema de Apolonio generalmente ocurren en pares; para cada círculo solución, hay un círculo solución conjugado (Figura 6). [1] Un círculo solución excluye los círculos dados que están encerrados por su solución conjugada, y viceversa. Por ejemplo, en la Figura 6, un círculo solución (rosa, arriba a la izquierda) encierra dos círculos dados (negros), pero excluye un tercero; a la inversa, su solución conjugada (también rosa, abajo a la derecha) encierra ese tercer círculo dado, pero excluye los otros dos. Los dos círculos solución conjugados están relacionados por inversión , por el siguiente argumento.
En general, tres círculos distintos tienen un único círculo (el círculo radical ) que los interseca a todos perpendicularmente; el centro de ese círculo es el centro radical de los tres círculos. [4] A modo de ilustración, el círculo naranja de la Figura 6 cruza los círculos negros dados en ángulos rectos. La inversión en el círculo radical deja los círculos dados sin cambios, pero transforma los dos círculos solución rosados conjugados entre sí. Bajo la misma inversión, los puntos de tangencia correspondientes de los dos círculos solución se transforman entre sí; a modo de ilustración, en la Figura 6, los dos puntos azules que se encuentran en cada línea verde se transforman entre sí. Por lo tanto, las líneas que conectan estos puntos tangentes conjugados son invariantes bajo la inversión; por lo tanto, deben pasar por el centro de la inversión, que es el centro radical (las líneas verdes se intersecan en el punto naranja de la Figura 6).
Inversión en forma de anillo
Si dos de los tres círculos dados no se intersecan, se puede elegir un centro de inversión para que esos dos círculos dados se vuelvan concéntricos . [2] [12] Bajo esta inversión, los círculos solución deben caer dentro del anillo entre los dos círculos concéntricos. Por lo tanto, pertenecen a dos familias de un parámetro. En la primera familia (Figura 7), las soluciones no encierran el círculo concéntrico interno, sino que giran como cojinetes de bolas en el anillo. En la segunda familia (Figura 8), los círculos solución encierran el círculo concéntrico interno. Generalmente hay cuatro soluciones para cada familia, lo que produce ocho soluciones posibles, consistentes con la solución algebraica.


Cuando dos de los círculos dados son concéntricos, el problema de Apolonio se puede resolver fácilmente utilizando un método de Gauss . [28] Se conocen los radios de los tres círculos dados, así como la distancia d non desde el centro concéntrico común hasta el círculo no concéntrico (Figura 7). El círculo solución se puede determinar a partir de su radio r s , el ángulo θ y las distancias d s y d T desde su centro hasta el centro concéntrico común y el centro del círculo no concéntrico, respectivamente. Se conocen el radio y la distancia d s (Figura 7), y la distancia d T = r s ± r non , dependiendo de si el círculo solución es interna o externamente tangente al círculo no concéntrico. Por lo tanto, por la ley de los cosenos ,

Aquí se ha definido una nueva constante C para abreviar, con el subíndice indicando si la solución es tangente externa o interna. Una simple reorganización trigonométrica da como resultado las cuatro soluciones

Esta fórmula representa cuatro soluciones, correspondientes a las dos opciones del signo de θ y las dos opciones para C. Las cuatro soluciones restantes se pueden obtener mediante el mismo método, utilizando las sustituciones para r s y d s indicadas en la Figura 8. Por lo tanto, las ocho soluciones del problema general de Apolonio se pueden encontrar mediante este método.
Dos círculos dados disjuntos pueden volverse concéntricos de la siguiente manera. Se construye el eje radical de los dos círculos dados; eligiendo dos puntos arbitrarios P y Q en este eje radical, se pueden construir dos círculos que estén centrados en P y Q y que intersequen los dos círculos dados ortogonalmente. Estos dos círculos construidos se intersecan entre sí en dos puntos. La inversión en uno de esos puntos de intersección F convierte los círculos construidos en líneas rectas que emanan de F y los dos círculos dados en círculos concéntricos, y el tercer círculo dado se convierte en otro círculo (en general). Esto se debe a que el sistema de círculos es equivalente a un conjunto de círculos apolíneos , que forman un sistema de coordenadas bipolares .
Cambio de tamaño e inversión
La utilidad de la inversión puede aumentarse significativamente mediante el cambio de tamaño. [37] [38] Como se señaló en la reconstrucción de Viète, los tres círculos dados y el círculo solución pueden cambiar de tamaño en tándem mientras se conservan sus tangencias. Por lo tanto, el problema de Apolonio inicial se transforma en otro problema que puede ser más fácil de resolver. Por ejemplo, los cuatro círculos pueden cambiar de tamaño de modo que un círculo dado se encoja a un punto; alternativamente, a menudo se pueden cambiar de tamaño dos círculos dados para que sean tangentes entre sí. En tercer lugar, los círculos dados que se intersecan pueden cambiar de tamaño para que dejen de intersectarse, después de lo cual se puede aplicar el método para invertir a un anillo. En todos estos casos, la solución del problema de Apolonio original se obtiene a partir de la solución del problema transformado deshaciendo el cambio de tamaño y la inversión.
Reducir un círculo dado a un punto
En el primer enfoque, los círculos dados se encogen o se hinchan (apropiadamente a su tangencia) hasta que un círculo dado se encoge a un punto P . [37] En ese caso, el problema de Apolonio degenera al caso límite CCP , que es el problema de encontrar un círculo solución tangente a los dos círculos dados restantes que pasa por el punto P . La inversión en un círculo centrado en P transforma los dos círculos dados en nuevos círculos, y el círculo solución en una línea. Por lo tanto, la solución transformada es una línea que es tangente a los dos círculos dados transformados. Hay cuatro de esas líneas solución, que pueden construirse a partir de los centros homotéticos externos e internos de los dos círculos. La re-inversión en P y deshacer el cambio de tamaño transforma dicha línea solución en el círculo solución deseado del problema original de Apolonio. Las ocho soluciones generales pueden obtenerse encogiendo y hinchando los círculos de acuerdo con las diferentes tangencias internas y externas de cada solución; Sin embargo, diferentes círculos dados pueden reducirse a un punto para obtener diferentes soluciones.
Cambiar el tamaño de dos círculos dados a la tangencia
En el segundo enfoque, los radios de los círculos dados se modifican apropiadamente por una cantidad Δ r de modo que dos de ellos sean tangentes (se toquen). [38] Su punto de tangencia se elige como el centro de inversión en un círculo que interseca cada uno de los dos círculos que se tocan en dos lugares. Tras la inversión, los círculos que se tocan se convierten en dos líneas paralelas: su único punto de intersección se envía al infinito bajo inversión, por lo que no pueden encontrarse. La misma inversión transforma el tercer círculo en otro círculo. La solución del problema invertido debe ser (1) una línea recta paralela a las dos líneas paralelas dadas y tangente al tercer círculo dado transformado; o (2) un círculo de radio constante que sea tangente a las dos líneas paralelas dadas y al círculo dado transformado. La re-inversión y el ajuste de los radios de todos los círculos por Δ r produce un círculo solución tangente a los tres círculos originales.
La solución de Gergonne

El enfoque de Gergonne consiste en considerar los círculos solución en pares. [1] Sea un par de círculos solución denotados como C A y C B (los círculos rosados en la Figura 6), y sean sus puntos tangentes con los tres círculos dados denotados como A 1 , A 2 , A 3 y B 1 , B 2 , B 3 , respectivamente. La solución de Gergonne apunta a localizar estos seis puntos y, por lo tanto, resolver los dos círculos solución.
La idea de Gergonne era que si se podía construir una línea L 1 de manera que se garantizara que A 1 y B 1 cayeran sobre ella, esos dos puntos podrían identificarse como los puntos de intersección de L 1 con el círculo dado C 1 (Figura 6). Los cuatro puntos tangentes restantes se ubicarían de manera similar, al encontrar las líneas L 2 y L 3 que contenían a A 2 y B 2 , y A 3 y B 3 , respectivamente. Para construir una línea como L 1 , se deben identificar dos puntos que se encuentren sobre ella; pero estos puntos no necesitan ser los puntos tangentes. Gergonne pudo identificar otros dos puntos para cada una de las tres líneas. Uno de los dos puntos ya ha sido identificado: el centro radical G se encuentra sobre las tres líneas (Figura 6).
Para localizar un segundo punto en las líneas L 1 , L 2 y L 3 , Gergonne notó una relación recíproca entre esas líneas y el eje radical R de los círculos solución, C A y C B . Para entender esta relación recíproca, considere las dos líneas tangentes al círculo C 1 dibujadas en sus puntos tangentes A 1 y B 1 con los círculos solución; la intersección de estas líneas tangentes es el punto polar de L 1 en C 1 . Dado que las distancias desde ese punto polar a los puntos tangentes A 1 y B 1 son iguales, este punto polar también debe estar en el eje radical R de los círculos solución, por definición (Figura 9). La relación entre los puntos polares y sus líneas polares es recíproca; si el polo de L 1 en C 1 está en R , el polo de R en C 1 debe estar inversamente en L 1 . Por lo tanto, si podemos construir R , podemos encontrar su polo P 1 en C 1 , dando el segundo punto necesario en L 1 (Figura 10).

Gergonne halló el eje radical R de los círculos solución desconocidos de la siguiente manera. Cualquier par de círculos tiene dos centros de semejanza ; estos dos puntos son las dos posibles intersecciones de dos líneas tangentes a los dos círculos. Por lo tanto, los tres círculos dados tienen seis centros de semejanza, dos para cada par distinto de círculos dados. Sorprendentemente, estos seis puntos se encuentran en cuatro líneas, tres puntos en cada línea; además, cada línea corresponde al eje radical de un par potencial de círculos solución. Para demostrar esto, Gergonne consideró líneas que pasan por puntos de tangencia correspondientes en dos de los círculos dados, por ejemplo, la línea definida por A 1 / A 2 y la línea definida por B 1 / B 2 . Sea X 3 un centro de semejanza para los dos círculos C 1 y C 2 ; entonces, A 1 / A 2 y B 1 / B 2 son pares de puntos antihomólogos , y sus líneas se intersecan en X 3 . Se sigue, por lo tanto, que los productos de distancias son iguales.

lo que implica que X 3 se encuentra en el eje radical de los dos círculos solución. El mismo argumento se puede aplicar a los otros pares de círculos, de modo que tres centros de similitud para los tres círculos dados deben encontrarse en los ejes radicales de pares de círculos solución.
En resumen, la línea deseada L 1 está definida por dos puntos: el centro radical G de los tres círculos dados y el polo en C 1 de una de las cuatro líneas que conectan los centros homotéticos. Encontrar el mismo polo en C 2 y C 3 da L 2 y L 3 , respectivamente; por lo tanto, se pueden localizar los seis puntos, a partir de los cuales se puede encontrar un par de círculos solución. Repitiendo este procedimiento para las tres líneas de centro homotético restantes se obtienen seis soluciones más, dando ocho soluciones en total. Sin embargo, si una línea L k no interseca su círculo C k para algún k , no hay un par de soluciones para esa línea de centro homotético.
Teoría de la intersección
Las técnicas de la geometría algebraica moderna , y en particular la teoría de intersecciones , se pueden utilizar para resolver el problema de Apolonio. En este enfoque, el problema se reinterpreta como un enunciado sobre círculos en el plano proyectivo complejo . Se permiten soluciones que involucran números complejos y las situaciones degeneradas se cuentan con multiplicidad. Cuando se hace esto, siempre hay ocho soluciones para el problema. [39]
Cada ecuación cuadrática en X , Y y Z determina una cónica única, su lugar geométrico de desaparición. A la inversa, cada cónica en el plano proyectivo complejo tiene una ecuación, y esa ecuación es única hasta un factor de escala general (porque reescalar una ecuación no cambia su lugar geométrico de desaparición). Por lo tanto, el conjunto de todas las cónicas puede parametrizarse mediante el espacio proyectivo de cinco dimensiones P 5 , donde la correspondencia es
![{\displaystyle \{[X:Y:Z]\in \mathbf {P} ^{2}\colon AX^{2}+BXY+CY^{2}+DXZ+EYZ+FZ^{2}=0 \}\leftrightarrow [A:B:C:D:E:F]\in \mathbf {P} ^{5}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f3d37635cf40391509ffad6dc73780499a2e540)
Un círculo en el plano proyectivo complejo se define como una cónica que pasa por los dos puntos O + = [1 : i : 0] y O − = [1 : − i : 0] , donde i denota una raíz cuadrada de −1 . Los puntos O + y O − se denominan puntos circulares . La variedad proyectiva de todos los círculos es la subvariedad de P 5 que consiste en aquellos puntos que corresponden a cónicas que pasan por los puntos circulares. Sustituyendo los puntos circulares en la ecuación para una cónica genérica se obtienen las dos ecuaciones


Tomando la suma y diferencia de estas ecuaciones se demuestra que es equivalente imponer las condiciones
- y .


Por lo tanto, la variedad de todos los círculos es un subespacio lineal tridimensional de P 5 . Después de reescalar y completar el cuadrado , estas ecuaciones también demuestran que cada cónica que pasa por los puntos circulares tiene una ecuación de la forma

que es la homogeneización de la ecuación usual de un círculo en el plano afín. Por lo tanto, estudiar círculos en el sentido anterior es casi equivalente a estudiar círculos en el sentido convencional. La única diferencia es que el sentido anterior permite círculos degenerados que son la unión de dos líneas. Los círculos no degenerados se llaman círculos suaves , mientras que los degenerados se llaman círculos singulares . Hay dos tipos de círculos singulares. Uno es la unión de la línea en el infinito Z = 0 con otra línea en el plano proyectivo (posiblemente la línea en el infinito nuevamente), y el otro es la unión de dos líneas en el plano proyectivo, una a través de cada uno de los dos puntos circulares. Estos son los límites de los círculos suaves cuando el radio r tiende a +∞ y 0 , respectivamente. En el último caso, ningún punto en ninguna de las dos líneas tiene coordenadas reales excepto el origen [0 : 0 : 1] .
Sea D un círculo liso fijo. Si C es cualquier otro círculo, entonces, por la definición de círculo, C y D se intersecan en los puntos circulares O + y O− . Como C y D son cónicas, el teorema de Bézout implica que C y D se intersecan en cuatro puntos en total, cuando esos puntos se cuentan con la multiplicidad de intersección adecuada . Es decir, hay cuatro puntos de intersección O + , O− , P y Q , pero algunos de estos puntos podrían colisionar. El problema de Appolonius se refiere a la situación en la que P = Q , lo que significa que la multiplicidad de intersección en ese punto es 2 ; si P también es igual a un punto circular, esto debería interpretarse como que la multiplicidad de intersección es 3 .
Sea Z D la variedad de círculos tangentes a D . Esta variedad es un cono cuadrático en el P 3 de todos los círculos. Para ver esto, considere la correspondencia de incidencia

Para una curva que es el lugar geométrico de desaparición de una única ecuación f = 0 , la condición de que la curva se encuentre con D en r con multiplicidad m significa que la expansión en serie de Taylor de f | D se anula hasta el orden m en r ; por lo tanto, es m condiciones lineales sobre los coeficientes de f . Esto demuestra que, para cada r , la fibra de Φ sobre r es una P 1 recortada por dos ecuaciones lineales en el espacio de círculos. En consecuencia, Φ es irreducible de dimensión 2 . Puesto que es posible exhibir un círculo que sea tangente a D en un único punto, un elemento genérico de Z D debe ser tangente en un único punto. Por lo tanto, la proyección Φ → P 2 que envía ( r , C ) a C es un morfismo biracional . De ello se deduce que la imagen de Φ , que es Z D , también es irreducible y bidimensional.
Para determinar la forma de Z D , fije dos círculos distintos C 0 y C ∞ , no necesariamente tangentes a D . Estos dos círculos determinan un lápiz , es decir, una línea L en el P 3 de círculos. Si las ecuaciones de C 0 y C ∞ son f y g , respectivamente, entonces los puntos en L corresponden a los círculos cuyas ecuaciones son Sf + Tg , donde [ S : T ] es un punto de P 1 . Los puntos donde L se encuentra con Z D son precisamente los círculos en el lápiz que son tangentes a D .
Hay dos posibilidades para el número de puntos de intersección. Una es que f o g , digamos f , sea la ecuación para D . En este caso, L es una línea que pasa por D . Si C ∞ es tangente a D , entonces también lo es cada círculo en el lápiz y, por lo tanto, L está contenido en Z D . La otra posibilidad es que ni f ni g sean la ecuación para D . En este caso, la función ( f / g )| D es un cociente de cuadráticas, ninguna de las cuales se anula de manera idéntica. Por lo tanto, se anula en dos puntos y tiene polos en dos puntos. Estos son los puntos en C 0 ∩ D y C ∞ ∩ D , respectivamente, contados con multiplicidad y con los puntos circulares deducidos. La función racional determina un morfismo D → P 1 de grado dos. La fibra sobre [ S : T ] ∈ P 1 es el conjunto de puntos P para los cuales f ( P ) T = g ( P ) S . Estos son precisamente los puntos en los que el círculo cuya ecuación es Tf − Sg corta a D . Los puntos de ramificación de este morfismo son los círculos tangentes a D . Por la fórmula de Riemann-Hurwitz , hay precisamente dos puntos de ramificación y, por lo tanto, L corta a Z D en dos puntos. Juntas, estas dos posibilidades para la intersección de L y Z D demuestran que Z D es un cono cuádrico. Todos esos conos en P 3 son iguales hasta un cambio de coordenadas, por lo que esto determina completamente la forma de Z D .
Para concluir el argumento, sean D 1 , D 2 y D 3 tres círculos. Si la intersección Z D 1 ∩ Z D 2 ∩ Z D 3 es finita, entonces tiene grado 2 3 = 8 , y por lo tanto hay ocho soluciones al problema de Apolonio, contadas con multiplicidad. Para demostrar que la intersección es genéricamente finita, considere la correspondencia de incidencia

Existe un morfismo que proyecta Ψ sobre su factor final de P 3 . La fibra sobre C es Z C 3 . Esta tiene dimensión 6 , por lo que Ψ tiene dimensión 9 . Como ( P 3 ) 3 también tiene dimensión 9 , la fibra genérica de la proyección de Ψ sobre los primeros tres factores no puede tener dimensión positiva. Esto demuestra que, genéricamente, hay ocho soluciones contadas con multiplicidad. Puesto que es posible exhibir una configuración donde las ocho soluciones sean distintas, la configuración genérica debe tener las ocho soluciones distintas.
Radios
En el problema genérico con ocho círculos solución, los recíprocos de los radios de cuatro de los círculos solución suman el mismo valor que los recíprocos de los radios de los otros cuatro círculos solución [40]
Casos especiales
Diez combinaciones de puntos, círculos y líneas.
El problema de Apolonio consiste en construir uno o más círculos tangentes a tres objetos dados en un plano, que pueden ser círculos, puntos o líneas. Esto da lugar a diez tipos de problema de Apolonio, uno correspondiente a cada combinación de círculos, líneas y puntos, que pueden etiquetarse con tres letras, C , L o P , para indicar si los elementos dados son un círculo, una línea o un punto, respectivamente (Tabla 1). [32] Como ejemplo, el tipo de problema de Apolonio con un círculo, una línea y un punto dados se denota como CLP .
Algunos de estos casos especiales son mucho más fáciles de resolver que el caso general de tres círculos dados. Los dos casos más simples son los problemas de dibujar un círculo a través de tres puntos dados ( PPP ) o tangente a tres líneas ( LLL ), que fueron resueltos por primera vez por Euclides en sus Elementos . Por ejemplo, el problema PPP se puede resolver de la siguiente manera. El centro del círculo solución está igualmente distante de los tres puntos y, por lo tanto, debe estar en la línea bisectriz perpendicular de cualesquiera dos. Por lo tanto, el centro es el punto de intersección de cualesquiera dos bisectrices perpendiculares. De manera similar, en el caso LLL , el centro debe estar en una línea que biseca el ángulo en los tres puntos de intersección entre las tres líneas dadas; por lo tanto, el centro se encuentra en el punto de intersección de dos de esas bisectrices de ángulos. Dado que hay dos de esas bisectrices en cada punto de intersección de las tres líneas dadas, hay cuatro soluciones para el problema general LLL (el incírculo y los excírculos del triángulo formado por las tres líneas).
Los puntos y las líneas pueden considerarse casos especiales de círculos; un punto puede considerarse como un círculo de radio infinitamente pequeño, y una línea puede considerarse como un círculo infinitamente grande cuyo centro también está en el infinito. Desde esta perspectiva, el problema general de Apolonio es el de construir círculos tangentes a tres círculos dados. Los otros nueve casos que involucran puntos y líneas pueden considerarse casos límite del problema general. [32] [12] Estos casos límite a menudo tienen menos soluciones que el problema general; por ejemplo, la sustitución de un círculo dado por un punto dado reduce a la mitad el número de soluciones, ya que un punto puede interpretarse como un círculo infinitesimal que es tangente interna o externamente.








Número de soluciones

El problema de contar el número de soluciones a los diferentes tipos del problema de Apolonio pertenece al campo de la geometría enumerativa . [12] [41] El número general de soluciones para cada uno de los diez tipos del problema de Apolonio se da en la Tabla 1 anterior. Sin embargo, disposiciones especiales de los elementos dados pueden cambiar el número de soluciones. A modo de ilustración, el problema de Apolonio no tiene solución si un círculo separa los dos (Figura 11); para tocar ambos círculos sólidos dados, el círculo solución tendría que cruzar el círculo punteado dado; pero eso no puede hacer, si va a tocar el círculo punteado tangencialmente. A la inversa, si tres círculos dados son todos tangentes en el mismo punto, entonces cualquier círculo tangente en el mismo punto es una solución; tales problemas de Apolonio tienen un número infinito de soluciones. Si cualquiera de los círculos dados es idéntico, hay asimismo una infinidad de soluciones. Si solo dos círculos dados son idénticos, solo hay dos círculos dados distintos; Los centros de los círculos de solución forman una hipérbola , como la utilizada en una solución al problema de Apolonio.
Muirhead fue el primero en realizar una enumeración exhaustiva del número de soluciones para todas las configuraciones posibles de tres círculos, puntos o líneas dados en 1896, [42] aunque Stoll [43] y Study ya habían realizado trabajos anteriores . [44] Sin embargo, el trabajo de Muirhead estaba incompleto; se amplió en 1974 [45] y en 1983 se publicó una enumeración definitiva, con 33 casos distintos. [12] Aunque las soluciones al problema de Apolonio generalmente ocurren en pares relacionados por inversión, en algunos casos es posible un número impar de soluciones, por ejemplo, la solución única para PPP , o cuando uno o tres de los círculos dados son en sí mismos soluciones. (Un ejemplo de esto último se da en la sección sobre el teorema de Descartes ). Sin embargo, no hay problemas de Apolonio con siete soluciones. [34] [43] Se han desarrollado y utilizado soluciones alternativas basadas en la geometría de círculos y esferas en dimensiones superiores. [26] [35]
Círculos dados mutuamente tangentes: los círculos de Soddy y el teorema de Descartes
Si los tres círculos dados son mutuamente tangentes, el problema de Apolonio tiene cinco soluciones. Tres soluciones son los propios círculos dados, ya que cada uno es tangente a sí mismo y a los otros dos círculos dados. Las dos soluciones restantes (mostradas en rojo en la Figura 12) corresponden a los círculos inscrito y circunscrito , y se denominan círculos de Soddy . [46] Este caso especial del problema de Apolonio también se conoce como el problema de las cuatro monedas . [47] Los tres círculos dados de este problema de Apolonio forman una cadena de Steiner tangente a los dos círculos de Soddy.

Cada círculo de Soddy, cuando se toma junto con los tres círculos dados, produce un conjunto de cuatro círculos que son mutuamente tangentes en seis puntos. Los radios de estos cuatro círculos están relacionados por una ecuación conocida como el teorema de Descartes . En una carta de 1643 a la Princesa Isabel de Bohemia , [48] René Descartes demostró que

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
donde k s = 1/ r s y r s son la curvatura y el radio del círculo solución, respectivamente, y de manera similar para las curvaturas k 1 , k 2 y k 3 y los radios r 1 , r 2 y r 3 de los tres círculos dados. Para cada conjunto de cuatro círculos mutuamente tangentes, existe un segundo conjunto de cuatro círculos mutuamente tangentes que son tangentes en los mismos seis puntos. [2] [49]
El teorema de Descartes fue redescubierto independientemente en 1826 por Jakob Steiner , [50] en 1842 por Philip Beecroft, [2] [49] y nuevamente en 1936 por Frederick Soddy . [51] Soddy publicó sus hallazgos en la revista científica Nature como un poema, The Kiss Precise , del cual se reproducen las dos primeras estrofas a continuación. La primera estrofa describe los círculos de Soddy, mientras que la segunda estrofa da el teorema de Descartes. En el poema de Soddy, se dice que dos círculos se "besan" si son tangentes, mientras que el término "curva" se refiere a la curvatura k del círculo.
Para que dos labios se besen quizás
no sea necesaria la trigonometría.
No es así cuando cuatro círculos se besan
entre sí tres.
Para que esto suceda, los cuatro deben ser
como tres en uno o uno en tres.
Si es uno en tres, sin duda
cada uno recibe tres besos desde fuera.
Si es tres en uno, entonces ese uno
es besado tres veces internamente.
Cuatro círculos para besarse.
Cuanto más pequeños, más curvados.
La curva es simplemente la inversa de
la distancia desde el centro.
Aunque su intriga dejó a Euclides mudo,
ya no hay necesidad de una regla empírica.
Como la curva cero es una línea recta
y las curvas cóncavas tienen signo menos,
la suma de los cuadrados de las cuatro curvas
es la mitad del cuadrado de su suma.
Daniel Pedoe ha derivado diversas extensiones del teorema de Descartes . [52]
Generalizaciones
El problema de Apolonio puede extenderse para construir todos los círculos que intersecan tres círculos dados en un ángulo preciso θ, o en tres ángulos de cruce especificados θ 1 , θ 2 y θ 3 ; [50] el problema de Apolonio ordinario corresponde a un caso especial en el que el ángulo de cruce es cero para los tres círculos dados. Otra generalización es el dual de la primera extensión, es decir, construir círculos con tres distancias tangenciales especificadas a partir de los tres círculos dados. [26]
{kind=link}

El problema de Apolonio puede extenderse del plano a la esfera y otras superficies cuadráticas . Para la esfera, el problema es construir todos los círculos (los límites de los casquetes esféricos ) que son tangentes a tres círculos dados en la esfera. [24] [53] [54] Este problema esférico puede convertirse en un problema planar correspondiente utilizando la proyección estereográfica . Una vez que se han construido las soluciones al problema planar, las soluciones correspondientes al problema esférico pueden determinarse invirtiendo la proyección estereográfica. Incluso de manera más general, se puede considerar el problema de cuatro curvas tangentes que resultan de las intersecciones de una superficie cuadrática arbitraria y cuatro planos, un problema considerado por primera vez por Charles Dupin . [9]
Al resolver el problema de Apolonio repetidamente para encontrar el círculo inscrito, los intersticios entre círculos mutuamente tangenciales se pueden rellenar de forma arbitrariamente fina, formando una junta apolínea , también conocida como empaquetamiento de Leibniz o empaquetamiento apolíneo . [55] Esta junta es un fractal , siendo autosimilar y teniendo una dimensión d que no se conoce exactamente pero que es aproximadamente 1,3, [56] que es mayor que la de una curva regular (o rectificable ) ( d = 1) pero menor que la de un plano ( d = 2). La junta apolínea fue descrita por primera vez por Gottfried Leibniz en el siglo XVII, y es un precursor curvo del triángulo de Sierpiński del siglo XX . [57] La junta apolínea también tiene profundas conexiones con otros campos de las matemáticas; por ejemplo, es el conjunto límite de los grupos kleinianos . [58]
La configuración de un círculo tangente a cuatro círculos en el plano tiene propiedades especiales, que han sido dilucidadas por Larmor (1891) [59] y Lachlan (1893). [60] Tal configuración es también la base del teorema de Casey , [17] en sí mismo una generalización del teorema de Ptolomeo . [37]
La extensión del problema de Apolonio a tres dimensiones, es decir, el problema de encontrar una quinta esfera que sea tangente a cuatro esferas dadas, se puede resolver por métodos análogos. [9] Por ejemplo, las esferas dadas y solución se pueden redimensionar de modo que una esfera dada se encoja al punto mientras se mantiene la tangencia. [38] La inversión en este punto reduce el problema de Apolonio a encontrar un plano que sea tangente a tres esferas dadas. En general, hay ocho planos de este tipo, que se convierten en las soluciones del problema original al invertir la inversión y el redimensionamiento. Este problema fue considerado por primera vez por Pierre de Fermat , [61] y se han desarrollado muchos métodos de solución alternativos a lo largo de los siglos. [62]
El problema de Apolonio puede incluso extenderse a d dimensiones, para construir las hiperesferas tangentes a un conjunto dado de d + 1 hiperesferas. [41] Tras la publicación de la rederivación del teorema de Descartes por Frederick Soddy en 1936, varias personas resolvieron (independientemente) el caso mutuamente tangente correspondiente a los círculos de Soddy en d dimensiones. [63]
Aplicaciones
La principal aplicación del problema de Apolonio, tal como lo formuló Isaac Newton, es la trilateración hiperbólica , que busca determinar una posición a partir de las diferencias en las distancias a al menos tres puntos. [8] Por ejemplo, un barco puede intentar determinar su posición a partir de las diferencias en los tiempos de llegada de las señales de tres transmisores sincronizados. Las soluciones al problema de Apolonio se utilizaron en la Primera Guerra Mundial para determinar la ubicación de una pieza de artillería a partir del momento en que se escuchó un disparo en tres posiciones diferentes, [9] y la trilateración hiperbólica es el principio utilizado por el Sistema de Navegación Decca y LORAN . [7] De manera similar, la ubicación de una aeronave puede determinarse a partir de la diferencia en los tiempos de llegada de la señal de su transpondedor a cuatro estaciones receptoras. Este problema de multilateración es equivalente a la generalización tridimensional del problema de Apolonio y se aplica a los sistemas de navegación por satélite globales (consulte GPS#Interpretación geométrica ). [31] También se utiliza para determinar la posición de los animales que llaman (como pájaros y ballenas), aunque el problema de Apolonio no se aplica si la velocidad del sonido varía con la dirección (es decir, el medio de transmisión no es isótropo ). [64]
El problema de Apolonio tiene otras aplicaciones. En el Libro 1, Proposición 21 de sus Principia , Isaac Newton utilizó su solución del problema de Apolonio para construir una órbita en mecánica celeste desde el centro de atracción y observaciones de líneas tangentes a la órbita correspondiente a la velocidad instantánea . [9] El caso especial del problema de Apolonio cuando los tres círculos son tangentes se utiliza en el método de círculos de Hardy-Littlewood de la teoría analítica de números para construir el contorno de Hans Rademacher para la integración compleja, dado por los límites de un conjunto infinito de círculos de Ford , cada uno de los cuales toca a varios otros. [65] Finalmente, el problema de Apolonio se ha aplicado a algunos tipos de problemas de empaquetamiento , que surgen en campos dispares, como los códigos de corrección de errores utilizados en los DVD y el diseño de productos farmacéuticos que se unen a una enzima particular de una bacteria patógena . [66]
Véase también
- Punto de Apolonio
- Teorema de Apolonio
- Punto isodinámico de un triángulo
Referencias
- ^ abcde Dörrie H (1965). "El problema de la tangencia de Apolonio". 100 grandes problemas de matemáticas elementales: su historia y soluciones . Nueva York: Dover. págs. 154-160 (§32).
- ^ abcde Coxeter HSM (1 de enero de 1968). "El problema de Apolonio". The American Mathematical Monthly . 75 (1): 5–15. doi :10.2307/2315097. ISSN 0002-9890. JSTOR 2315097.
- ^ ab Coolidge JL (1916). Tratado sobre el círculo y la esfera . Oxford: Clarendon Press. págs. 167-172.
- ^ abc Coxeter HSM , Greitzer SL (1967). Geometría revisitada . Washington : MAA . ISBN 978-0-88385-619-2.
- ^ Coxeter, HSM (1969). Introducción a la geometría (2.ª ed.). Nueva York: Wiley. ISBN 978-0-471-50458-0.
- ^ Needham, T (2007). Análisis complejo visual . Nueva York: Oxford University Press. pp. 140–141. ISBN. 978-0-19-853446-4.
- ^ ab Hofmann-Wellenhof B, Legat K, Wieser M, Lichtenegger H (2003). Navegación: principios de posicionamiento y orientación . Saltador. ISBN 978-3-211-00828-7.
- ^ ab Schmidt, RO (1972). "Un nuevo enfoque para la geometría de la localización de diferencias de rango". IEEE Transactions on Aerospace and Electronic Systems . AES-8 (6): 821–835. Bibcode :1972ITAES...8..821S. doi :10.1109/TAES.1972.309614. S2CID 51648067.
- ^ abcdefg Althiller-Court N (1961). "El problema de Apolonio". The Mathematics Teacher . 54 : 444–452. doi :10.5951/MT.54.6.0444.
- ^ Gabriel-Marie F (1912). Exercices de géométrie, comprenant l'exposé des méthodes géométriques et 2000 questions résolues (en francés). Visitas guiadas: Maison A. Mame et Fils . págs. 18–20, 673–677.
- ^ ab Pappus (1876). F Hultsch (ed.). Pappi Alexandrini collectionis quae supersunt (en latín) (3 volúmenes ed.).
- ^ abcdefg Bruen A, Fisher JC, Wilker JB (1983). "Apolonio por inversión". Revista de Matemáticas . 56 (2): 97–103. doi :10.2307/2690380. JSTOR 2690380.
- ^ ab van Roomen A (1596). Problema Apolloniacum quo datis tribus circulis, quaeritur quartus eos contingens, antea a...Francisco Vieta...omnibus mathematicis...ad construendum propositum, jam vero per Belgam...constructum (en latín). Würzburg: Typis Georgii Fleischmanni. (en latín)
- ^ ab Newton I (1974). DT Whiteside (ed.). Los documentos matemáticos de Isaac Newton, volumen VI: 1684–1691 . Cambridge: Cambridge University Press. pág. 164. ISBN 0-521-08719-8.
- ^ ab Newton I (1687). Philosophiæ Naturalis Principia Mathematica . Libro I, Sección IV, Lema 16.
- ^ Newton I (1974). DT Whiteside (ed.). Los documentos matemáticos de Isaac Newton, volumen VI: 1684-1691 . Cambridge: Cambridge University Press. págs. 162-165, 238-241. ISBN 0-521-08719-8.
- ^ ab Casey J (1886) [1881]. Una continuación de los primeros seis libros de los Elementos de Euclides . Hodges, Figgis & co. pág. 122. ISBN 978-1-4181-6609-0.
- ^ Courant R, Robbins H (1943). ¿Qué son las matemáticas? Un enfoque elemental de las ideas y los métodos . Londres: Oxford University Press. pp. 125-127, 161-162. ISBN 0-19-510519-2.
- ^ Bold B (1982). Problemas famosos de geometría y cómo resolverlos. Dover Publications. pp. 29-30. ISBN 0-486-24297-8.
- ^ ab Viète F. (1600). "Apollonius Gallus. Seu, Exsuscitata Apolloni Pergæi Περι Επαφων Geometria". En Frans van Schooten (ed.). Francisci Vietae Opera mathematica (en latín). ex officina B. et A. Elzeviriorum (Lugduni Batavorum) (publicado en 1646). págs. 325–346. (en latín)
- ^ Boyer CB , Merzbach UC (1991). "Apolonio de Perga". Una historia de las matemáticas (2ª ed.). John Wiley & Sons, Inc. pág. 322.ISBN 0-471-54397-7.
- ^ Simson R (1734) Colección Matemática , volumen VII, p. 117. Zeuthen HG (1886). Die Lehre von den Kegelschnitten im Altertum (en alemán). Copenhague: Desconocido. págs. 381–383.
Heath, Thomas Little . Una historia de las matemáticas griegas , volumen II: desde Aristarco hasta Diofanto . Oxford: Clarendon Press. págs. 181–185, 416–417. - ↑ Poncelet JV (enero de 1811). "Soluciones de problemas mayores de geometría y mecánica". Correspondance sur l'École Impériale Polytechnique (en francés). 2 (3): 271–273.
- ^ ab Gergonne J (1813-1814). "Recherche du cercle qui en touche tres autres sur une sphère". Ana. Matemáticas. Pures Appl. (en francés). 4 .
- ^ Petersen J (1879). Métodos y teorías para la solución de problemas de construcciones geométricas, aplicados a 410 problemas . Londres: Sampson Low, Marston, Searle y Rivington. págs. 94-95 (ejemplo 403).
- ^ abcde Zlobec BJ, Kosta NM (2001). "Configuraciones de ciclos y el problema de Apolonio". Rocky Mountain Journal of Mathematics . 31 (2): 725–744. doi : 10.1216/rmjm/1020171586 .
- ^ Euler L. (1790). "Solutio facilis problematis, quo quaeritur circulus, qui datos tres circulos tangat" (PDF) . Nova Acta Academiae Scientiarum Imperialis Petropolitanae (en latín). 6 : 95-101.Reimpreso en Euler's Opera Omnia , serie 1, volumen 26, págs. 270–275.
- ^ ab Gauss CF (1873). Werke, 4. Band (en alemán) (reimpreso en 1973 por Georg Olms Verlag (Hildesheim) ed.). Gotinga: Königlichen Gesellschaft der Wissenschaften. págs. 399–400. ISBN 3-487-04636-9.
- ^ Carnot L (1801). De la corrélation dans les figures de géométrie (en francés). París: Editorial desconocida. págs. Núms. 158-159.
Carnot L (1803). Géométrie de position (en francés). París: Editorial desconocida. págs. 390, §334. - ^ Cauchy AL (julio de 1806). "Du círculo tangente a tres círculos donnés". Correspondance sur l'École Polytechnique (en francés). 1 (6): 193-195.
- ^ ab Hoshen J (1996). "Las ecuaciones GPS y el problema de Apolonio". IEEE Transactions on Aerospace and Electronic Systems . 32 (3): 1116–1124. Bibcode :1996ITAES..32.1116H. doi :10.1109/7.532270. S2CID 30190437.
- ^ abc Altshiller-Court N (1952). Geometría universitaria: Introducción a la geometría moderna del triángulo y el círculo (2.ª edición, edición revisada y ampliada). Nueva York: Barnes and Noble. págs. 222–227. ISBN 978-0-486-45805-2.
Hartshorne, Robin (2000). Geometría: Euclides y más allá . Nueva York: Springer Verlag. pp. 346–355, 496, 499. ISBN 978-0-387-98650-0.
Rouché, Eugène; Ch de Comberousse (1883). Traité de géométrie (en francés) (quinta edición, edición revisada y aumentada). París: Gauthier-Villars. págs. 252-256. OCLC 252013267. - ^ Coaklay GW (1860). "Soluciones analíticas de los diez problemas en las tangencias de círculos; y también de los quince problemas en las tangencias de esferas". The Mathematical Monthly . 2 : 116–126.
- ^ ab Pedoe D (1970). "El séptimo círculo que falta". Elementos de Matemáticas . 25 : 14-15.
- ^ ab Knight RD (2005). "El problema de contacto de Apolonio y la geometría de contacto de Lie". Journal of Geometry . 83 (1–2): 137–152. doi :10.1007/s00022-005-0009-x. S2CID 122228528.
- ^ Salmon G (1879). Tratado sobre secciones cónicas, que contiene una descripción de algunos de los métodos algebraicos y geométricos modernos más importantes . Londres: Longmans, Green and Co., págs. 110-115, 291-292. ISBN 0-8284-0098-9.
- ^ abc Johnson RA (1960). Advanced Euclidean Geometry: An Elementary treatise on the geometry of the Triangle and the Circle (reimpresión de la edición de 1929 de Houghton Mifflin ed.). Nueva York: Dover Publications. pp. 117–121 (el problema de Apolonio), 121–128 (los teoremas de Casey y Hart). ISBN 978-0-486-46237-0.
- ^ abc Ogilvy, CS (1990). Excursiones en geometría . Dover. pp. 48-51 (problema de Apolonio), 60 (extensión a esferas tangentes). ISBN 0-486-26530-7.
- ^ Eisenbud, David y Harris, Joe, 3264 y todo eso: un segundo curso de geometría algebraica . Cambridge University Press, 2016. ISBN 978-1107602724 . págs. 66–68.
- ^ Milorad R. Stevanovic, Predrag B. Petrovic y Marina M. Stevanovic, "Radios de círculos en el problema de Apolonio", Forum Geometricorum 17 (2017), 359–372: Teorema 1. http://forumgeom.fau.edu/FG2017volume17/FG201735.pdf
- ^ ab Dreschler K, Sterz U (1999). "El problema de contacto de Apolo en el espacio n en vista de la geometría enumerativa". Acta Mathematica Universitatis Comenianae . 68 (1): 37–47.
- ^ Muirhead RF (1896). "Sobre el número y la naturaleza de las soluciones del problema del contacto apolíneo". Actas de la Sociedad Matemática de Edimburgo . 14 : 135–147, figuras adjuntas 44–114. doi : 10.1017/S0013091500031898 .
- ^ ab Stoll V (1876). "Zum Problem des Apollonius". Mathematische Annalen (en alemán). 6 (4): 613–632. doi :10.1007/BF01443201. S2CID 120097802.
- ^ Estudio E (1897). "El problema apolonische". Mathematische Annalen (en alemán). 49 (3–4): 497–542. doi :10.1007/BF01444366. S2CID 120984176.
- ^ Fitz-Gerald JM (1974). "Una nota sobre un problema de Apolonio". Journal of Geometry . 5 : 15–26. doi :10.1007/BF01954533. S2CID 59444157.
- ^ Eppstein D (1 de enero de 2001). "Esferas tangentes y centros de triángulos". The American Mathematical Monthly . 108 (1): 63–66. arXiv : math/9909152 . doi :10.2307/2695679. ISSN 0002-9890. JSTOR 2695679. S2CID 14002377.
- ^ Oldknow A (1 de abril de 1996). "El triángulo de Euler–Gergonne–Soddy de un triángulo". The American Mathematical Monthly . 103 (4): 319–329. doi :10.2307/2975188. ISSN 0002-9890. JSTOR 2975188.
Weisstein, EW . "Problema de las cuatro monedas". MundoMatemático . Consultado el 6 de octubre de 2008 . - ^ Descartes R , Œuvres de Descartes, Correspondance IV , (C. Adam y P. Tannery, Eds.), París: Leopold Cert 1901. (en francés)
- ^ ab Beecroft H (1842). "Propiedades de los círculos en contacto mutuo". Diario de damas y caballeros . 139 : 91–96.
Beecroft H (1846). "Título desconocido". Diario de damas y caballeros : 51.(Artículo en línea de MathWords archivado el 18 de enero de 2008 en Wayback Machine ) - ^ ab Steiner J (1826). "Einige geometrische Betrachtungen". Journal für die reine und angewandte Mathematik . 1 : 161–184, 252–288. doi :10.1515/crll.1826.1.161. S2CID 122065577.
- ^ Soddy F (20 de junio de 1936). "El beso preciso". Nature . 137 (3477): 1021. Bibcode :1936Natur.137.1021S. doi : 10.1038/1371021a0 .
- ^ Pedoe D (1 de junio de 1967). "Sobre un teorema en geometría". Amer. Math. Monthly . 74 (6): 627–640. doi :10.2307/2314247. ISSN 0002-9890. JSTOR 2314247.
- ^ Carnot L (1803). Geometría de posición . París: Editorial desconocida. págs. 415, §356.
- ^ Vannson (1855). "Contacto de círculos sobre la esfera, por la geometría". Nouvelles Annales de Mathématiques (en francés). XIV : 55–71.
- ^ Kasner E, Supnick F (diciembre de 1943). "El empaquetamiento apolíneo de círculos". Proc. Natl. Sci. USA . 29 (11): 378–384. Bibcode :1943PNAS...29..378K. doi : 10.1073/pnas.29.11.378 . ISSN 0027-8424. PMC 1078636 . PMID 16588629.
- ^ Boyd, David W. (1973). "Límites mejorados para las constantes de empaquetamiento de discos". Aequationes Mathematicae . 9 : 99–106. doi :10.1007/BF01838194. S2CID 121089590.
Boyd, David W. (1973). "La dimensión del conjunto residual del empaquetamiento apolíneo". Mathematika . 20 (2): 170–174. doi :10.1112/S0025579300004745.
McMullen, Curtis T. (1998). "Dimensión de Hausdorff y dinámica conforme III: Cálculo de la dimensión" (PDF) . American Journal of Mathematics . 120 (4): 691–721. doi :10.1353/ajm.1998.0031. S2CID 15928775. - ^ Mandelbrot B (1983). La geometría fractal de la naturaleza. Nueva York: WH Freeman. pág. 170. ISBN 978-0-7167-1186-5.
Aste T, Weaire D (2008). La búsqueda del embalaje perfecto (2.ª ed.). Nueva York: Taylor and Francis. Págs. 131-138. ISBN. 978-1-4200-6817-7. - ^ Mumford D , Serie C, Wright D (2002). Las perlas de Indra: la visión de Felix Klein . Cambridge: Cambridge University Press. pp. 196–223. ISBN. 0-521-35253-3.
- ^ Larmor A (1891). "Contactos de sistemas de círculos". Actas de la London Mathematical Society . 23 : 136–157. doi :10.1112/plms/s1-23.1.135.
- ^ Lachlan R (1893). Un tratado elemental sobre geometría pura moderna . Londres: Macmillan. pp. §383–396, pp. 244–251. ISBN 1-4297-0050-5.
- ^ de Fermat P , Varia opera mathematica , p. 74, Tolos, 1679.
- ^ Euler L. (1810). "Solutio facilis problematis, quo quaeritur sphaera, quae datas quatuor sphaeras utcunque dispositas contingat" (PDF) . Mémoires de l'Académie des Sciences de St.-Pétersbourg (en latín). 2 : 17–28.Reimpreso en Opera Omnia de Euler , serie 1, volumen 26, págs. Carnot L (1803). Géométrie de position (en francés). París: Imprimerie de Crapelet, chez JBM Duprat. págs. 357, §416.
Hachette JNP (septiembre de 1808). "Sobre el contacto de las esferas; sobre la esfera tangente a cuatro esferas donadas; sobre el círculo tangente a tres círculos donados". Correspondance sur l'École Polytechnique (en francés). 1 (2): 27–28.
Français J (enero de 1810). "De la esfera tangente a cuatro esferas donadas". Correspondance sur l'École Impériale Polytechnique (en francés). 2 (2): 63–66.
Français J (enero de 1813). "Solución analítica del problema de la esfera tangente a cuatro esferas donadas". Correspondance sur l'École Impériale Polytechnique (en francés). 2 (5): 409–410.
Dupin C (enero de 1813). "Mémoire sur les sphères". Correspondance sur l'École Impériale Polytechnique (en francés). 2 (5): 423.
Rey T (1879). Synthetische Geometrie der Kugeln (PDF) (en alemán). Leipzig: BG Teubner.
Serret JA (1848). "De la esfera tangente a cuatro esferas donnèes". Journal für die reine und angewandte Mathematik . 1848 (37): 51–57. doi :10.1515/crelle-1848-18483704. S2CID 201061558.
Coaklay GW (1859–1860). "Soluciones analíticas de los diez problemas en las tangencias de círculos; y también de los quince problemas en las tangencias de esferas". The Mathematical Monthly . 2 : 116–126.
Alvord B (1 de enero de 1882). "La intersección de círculos y la intersección de esferas". American Journal of Mathematics . 5 (1): 25–44, con cuatro páginas de figuras. doi :10.2307/2369532. ISSN 0002-9327. JSTOR 2369532. - ^ Gossett T (1937). "El beso preciso". Nature . 139 (3506): 62. Bibcode :1937Natur.139Q..62.. doi : 10.1038/139062a0 .
- ^ Spiesberger, JL (2004). "Geometría de la localización de sonidos a partir de diferencias en el tiempo de viaje: isodiacronismos". Revista de la Sociedad Acústica de América . 116 (5): 3168–3177. Bibcode :2004ASAJ..116.3168S. doi :10.1121/1.1804625. PMID 15603162. S2CID 626749.
- ^ Apostol TM (1990). Funciones modulares y series de Dirichlet en la teoría de números (2.ª ed.). Nueva York: Springer-Verlag . ISBN 978-0-387-97127-8.
- ^ Lewis RH, Bridgett S (2003). "Ecuaciones de tangencia cónica y problemas de Apolonio en bioquímica y farmacología". Matemáticas y computadoras en simulación . 61 (2): 101–114. CiteSeerX 10.1.1.106.6518 . doi :10.1016/S0378-4754(02)00122-2.
Lectura adicional
- Boyd, DW (1973). "El empaquetamiento osculatorio de una esfera tridimensional". Revista Canadiense de Matemáticas . 25 (2): 303–322. doi : 10.4153/CJM-1973-030-5 . S2CID 120042053.
- Callandreau, Édouard (1949). Célèbres problèmes mathématiques (en francés). París: Albin Michel. págs. 219–226. OCLC 61042170.
- Camerer, JG (1795). Apollonii de Tactionibus, quae supersunt, ac maxime lemmata Pappi, in hos libros Graece nunc primum edita, e codicibus manuscritois, cum Vietae librorum Apollonii restitutione, adjectis observeibus, computationibus, ac problematis Apolloniani historia (en latín). Gothae: Ettinger.
- Gisch D, Ribando JM (2004). "Apollonius' Problem: A Study of Solutions and Their Connections" (PDF) . American Journal of Undergraduate Research . 3 : 15–25. doi : 10.33697/ajur.2004.010 . Archivado desde el original (PDF) el 2008-04-15 . Consultado el 2009-04-16 .
- Pappus de Alejandría (1933). Pappus d'Alexandrie: La collection mathématique (en francés). París. OCLC 67245614.
{{cite book}}: Mantenimiento de CS1: falta la ubicación del editor ( enlace )Traducción, introducción y notas de Paul Ver Eecke. - Simón, M (1906). Über die Entwicklung der Elementargeometrie im XIX. Jahrhundert (en alemán). Berlín: Teubner. págs. 97-105.
- Wells, D (1991). Diccionario Penguin de geometría curiosa e interesante . Nueva York: Penguin Books. págs. 3-5. ISBN 0-14-011813-6.
Enlaces externos
- "Pregunte al Dr. Math: solución". Mathforum . Consultado el 5 de mayo de 2008 .
- Weisstein, Eric W. "El problema de Apolonio". MathWorld .
- "El problema de Apolonio". Cut The Knot . Consultado el 5 de mayo de 2008 .
- Kunkel, Paul. "Tangent Circles". Whistler Alley . Consultado el 5 de mayo de 2008 .
- Austin, David (marzo de 2006). "Cuando besar implica trigonometría". Columna destacada en el sitio web de la American Mathematical Society . Consultado el 5 de mayo de 2008 .
